
Количество ошибок допускаемых водителем при увеличении скорости
Обновлено: 17.05.2024
2021 год. IoT окружил нас с Вами со всех сторон. GPS/GLONASS трэкерами и всевозможными облачными платформами слежения нас зазывают со всех сторон. Казалось бы, с чего вдруг я решил, что данный пост имеет актуальность?! Но не все так однозначно - давайте разбираться!
Ни для кого не секрет, что основной статьей затрат при автомобильных грузоперевозках является стоимость топлива. Все участники данной игры (Автомобильные грузоперевозки) прилагают максимум усилий для минимизации данной статьи расходов. Автопроизводители бесконечно совершенствуют свои модели автомобилей, предлагая все более производительные, безопасные и экономичные седельные тягачи. Развитые страны строят более экономичные автомагистрали.
Логистические компании выстраивают более оптимальные логистические маршруты и казалось бы все движется только вверх и вперед и с каждым годом расходы транспортной компании на топливо должны уменьшаться! Но в жизни получается не так. Несомненно, если сравнивать 1990,2000 и 2010 года, то по мере обновления моделей грузовых автомобилей, расход топлива стремительно сокращался. К примеру для грузовиков 1990 года выпуска при перевозке 20 тонн груза расход топлива 45л/100км считался нормальным. Моделям 2000-х годов удавалось выйти из 40л/100км расхода топлива, а грузовики 2010 годов выпуска уже могли хвастаться расходом 30-35 л/100км пути. Но что происходит сейчас, в 2021году? Современные модели грузовиков заявляют о паспортных расходах в 21. 23. 25л/100км, но в реальных условиях транспортные компании получают средний расход автомобилей в районе 30-31л/100км. Встает резонный вопрос?
Получается что автопроизводители лгут и их автомобили не стали более экономичными и это всего лишь маркетинговые ходы? На самом деле нет - проблема кроется в другом.
Автопроизводители, как и производители электроники, очень сильно шагнули вперед и автомобили обогнали в своем развитии людей, которые их эксплуатируют. Ситуация стала такова, что люди, управляющие современными грузовыми автомобилями, не могут раскрыть полный потенциал автомобиля с точки зрения расхода топлива.

Навык эффективного вождения - это такой же полноценный навык, как и умение управлять мотоциклом, или езды на горными лыжами. Конечно, проехать на мотоцикле по прямой и спуститься на лыжах может, в принципе, каждый, но чтобы стать мастером в этом деле - необходимо учиться и бесконечно тренироваться.
Но, казалось бы, с этим у нас тоже должно быть все в порядке. Практически все навигационные системы и GPS/Glonass трэкеры имеют опцию ECO DRIVING которая должна оценивать водителя. Но вот тут как раз таки маркетинг чистой воды!) Опция вроде бы есть, а вот толку от нее нет!
Проанализировав большую часть предложенных решений на рынке, оказалось, что разработчики не стали заморачиваться над проблемой и взяли в основу довольно примитивную методику оценки:

Алгоритмы ECO Driving
Хотел было я дать комментарий к каждому параметру, в чем его + и -, но текста получилось на 3 страницы) В общем, если подвести жирную черту ИТОГО, то эти критерии оценки стиля вождения водителя настолько сильно обобщенные, что более половины ситуаций не анализируются данными критериями, а если и рассматриваются - то безобоснованно штрафуют водителей за ситуации, на которые они не влияют. К примеру критерий Остановки - за рейс Москва - Париж - Москва, автомобиль сделал 157 остановок, из них 54 остановки - это пробки, 82 остановки - это прохождение очередей на границах. 13 остановок - это загрузки/выгрузки/растаможки, и всего 8 остановок были инициированы водителем. А по данной системе оценится он по всем 157 остановкам. ) Системы оценки стиля вождения, основанные на схожих алгоритмах больше игрушка, нежели инструмент оптимизации и управления.
Что же, начнем строить свои алгоритмы!
За исходные данные мы берем седельный тягач, с расширенным CAN протоколом, цифровой ДУТ, вариации с количеством ступеней неизнашивающихся тормозных систем и наличие встроенных электронных помощников (круиз контроль, система аварийного торможения, система слежения за разметкой, система учета рельефа местности и пр.) без привязки к марке грузовика. МКПП и АКПП. Электронная педаль газа и наличием системы EBS не старше 2006г. ПО верхнего уровня Wialon. Выбор обусловлен всеядностью платформы с точки зрения телематического оборудования. GPS трэкер с интерфейсами RS,1-wire, BT, CAN BUS. Дополнительные модули RFID, выносной модуль вибраций (удара). И конечно же нам понадобится гибкая логика, что то вроде Easy Logic от Galileosky.
Итак, начнем, пожалуй, с самого энергозатратного с точки зрения автомобиля параметра.
Превентивная езда/ Режим разгона
Данный критерий характеризует способность водителя к предусмотрительному вождению, т.е. умению водителя прогнозировать и предусматривать дорожную обстановку и принимать управляющее воздействие на автомобиль во время разгона до события, а не по факту. Основная задача избегать РЕЗКИХ управляющих воздействий
Пример: водитель начинает движение и динамично разгоняется до ограничителя скорости в 83 км/ч, но тут же быстренько упирается в идущий автомобиль с меньшей скоростью 75 км/ч, а совершить обгон возможности нет и ему приходится тормозить до скорости данного транспортного средства, а затем снова разгоняться и пытаться его обгонять.
Способ реализации алгоритма: после промежутка разгона автомобиля на >=10км/ч, должен следовать равномерный участок графика скорости в диапазоне +-2км/ч.
Система выставления баллов:
22 секунды прямолинейного движения - 10 баллов,
18 секунд - 9 баллов,
15 секунд - 8 баллов
// 22 секунды взяты из расчета 500 метров прямой видимости на дороге
Для настройки системы оценок необходимо предусмотреть возможность менять константы в пользовательском режиме, т.к. баллы за критерии приведены в этой статье справочно, для понимания алгоритмов.
Превентивная езда/ Режим торможения
Здесь все аналогично Режиму разгона.
Равномерная скорость движения
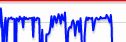
Анти пример: данный параметр нам нужен для борьбы вот с таким вот графиком скорости автомобиля.
Способ реализации алгоритма: Считается количество циклов изменения вектора скорости. Идеальная езда - один цикл от троганья с места до полной остановки.

Система выставления баллов:
10 циклов - 9,0 баллов
20 циклов - 8,0 баллов
!. Изменением вектора считается изменение скорости на величину от 2 км/ч до 10 км/ч. Колебания скорости до 2км/ч обусловлено гистерезисом круиз контроля, а изменение скорости на 10 км/ч и более рассматриваем за дорожную обстановку.
Использование педали газа
Когда водитель орудует педалью газа, система управления двигателем отрабатывает нажатие на педаль газа в процентном значении и даже небольшое кратковременное дерганье педалью приводит к подачам порций топлива для отработки желаемого ускорения, но так как автопоезд с массой 40 тонн слишком инерционен, то такие управляющие воздействия незаметны водителю, но приводят к пустой трате топлива. Ошибочно мнение, что автомобиль сглаживает волнения педали для экономии топлива.
Анти пример: Режим движения водителя по проселочной дороге за впереди идущем авто. Он едет примерно с одной скоростью но постоянно мучает педаль газа туда/сюда пытаясь держаться на одинаковом расстоянии до впереди идущего авто.
Способ реализации алгоритма: Считается количество колебаний процентов нажатия педали газа. Идеальная езда - один цикл от троганья с места до полной остановки.
1 цикл - 10,0 баллов
10 циклов - 9,0 баллов
20 циклов - 8,0 баллов
!. Циклом считается изменение нажатия педали газа на величину от 2 до 30% вниз затем вверх. Аналогия как с равномерной скоростью, только анализируем график нажатия педали газа в %.
Разгон
Процесс разгона должен происходить в зеленом секторе оборотов двигателя. Если водитель разгоняется слишком медленно - то АКПП сбрасывает повышенную передачу на 850-900 об/мин, а зеленый сектор работы турбины начинается с 1040об/мин. Если же разгонять автомобиль слишком сильно - то АКПП переключает передачи в диапазоне 1300-1650 об/мин, а это уже выходит за пределы зеленого сектора.
Способ реализации алгоритма: Считаем количество раз превышения двигателем оборотов свыше 1600 и ниже 1050 при затребованной мощности.
! Если в момент превышения мощности не было затребовано, значит это режим наката или торможения моторного тормоза.
10 раз - 10 баллов
20 раз - 9 баллов
30 раз - 8 баллов
Торможение
Тут все сложно. Важно правильно тормозить! Не только важна сила нажатие педали тормоза, но и алгоритм торможения/Замедления автомобиля, поскольку постоянное и длительное очень легкое торможение палит и перегревает колодки, и его можно заменить использованием не изнашиваемых тормозных систем (торможение оборотами двигателя/ретардер/претардер/моторный тормоз/горный тормоз) . Идеальный алгоритм торможения:
1 этап торможения это накат - 10 сек длительность использования
2 этап торможения это Моторный тормоз ступень 1 - 9 сек
3 этап торможения это Моторный тормоз ступень 2 - 8 сек
4 этап торможения это Моторный тормоз ступень 3 - 7 сек
5 этап торможения это Ретардер ступень 1 - 6 сек
6 этап торможения это Ретардер ступень 2 - 5 сек и только после этого жмем на педаль)))
7 этап торможения это Рабочий тормоз 1-30% - 4 сек
8 этап торможения это Рабочий тормоз 30-50% - 3 сек
9 этап торможения это Рабочий тормоз 50-70% - 2 сек
10 этап торможения это Рабочий тормоз 70-100% - 1 сек
!! На разных авто разное количество ступеней моторного тормоза и ретардера.
Балл за одно торможение зависит от количества ступеней, которые водитель выполнил правильно.
1-10 выполнены, то балл 10,00
2-10 выполнены, то балл 9,00
5-10 выполнены, то балл 8,00
7-10 выполнены, то балл 7,00
Остановки
Поскольку трогание с места является одним из наиболее затратных по топливу процессов (около 700 грамм топлива на разгон сцепки полной массы) при движении, количество остановок, которых можно избежать, следует по возможности сократить до минимума. Тут очень важно понимать что общее количество остановок слишком неинформативный критерий! Есть пробки, особенно их много в Европе. Есть очереди на границах, есть погрузки и выгрузки на которые водители не влияют…
Способ реализации алгоритма: Считаем количество остановок после 3 км пути. Т.е. остановки через каждые 10 метров игнорируем, это пробки/очереди/загрузки/выгрузки.
5 остановок - 10 баллов
10 остановок - 9 баллов
15 остановок - 8 баллов
Сложность трассы
Не все маршруты одинаковы и количество и процент нажатия педали тормоза при поездке в Азербайджан и в Германию очень отличается и в этом нет влияния водителя поэтому сложность трассы тоже необходимо учитывать
"Средний уклон"
"Средний вес"
"Количество положительных остановок (очереди и пробки)"
Способ реализации алгоритма:
А. Средний уклон - акселерометр
Б. Средний вес - CAN
В. Количество остановок = общее количество остановок за вычетом количество ненужных остановок из п.6
Накат
С этим параметром попроще его уже все хорошо считают. Из практики - хороший накат за рейс плавает в размере 14-16% от общего пути .
Неиспользование помощников автомобиля
В современных автомобилях много очень полезных помощников, которые водители так и норовят выключить в пути, мол мне лучше знать как ехать! К примеру рельеф местности загружен практически в каждый современный автомобиль. В Мерседесе данная система называется PPC, и автомобиль выбирает скоростной режим прохождения гор и поворотов учитывая рельеф. К примеру если после высокой горы будет сразу следовать спуск, то в конце подъема на гору машина перестанет поддерживать заданную скорость и закатится на горку на скорости 50км/ч и начнет потихоньку перекатываться горку а затем разгоняться накатом, но не всем водителям такое по душе. А еще машины теперь любят сами заранее тормозить перед поворотом)

Система РРС сама заранее сбросит скорость перед перекрестком.
Оцениваем процент пути с включенными системами
А. Режим AUTO ВКЛ (в сравнении с Manual)
Б. РРС ВКЛ
В. Слежение за разметкой ВКЛ
Г. аварийное торможение ВКЛ
Д. Режим ECONOMY вкл (в сравнении с AUTO)
Е. круиз контроль/ограничитель скорости ВКЛ (круиз + ограничитель)
Ё. Усталость водителя ВКЛ
Ж. Слежение за дорожными знаками ВКЛ
Оценка = (А+Б+0,25*В+0,25*Г+Д+Е + 0,25*Ё + 0,25 * Ж)/6
Мощностная диаграмма пути
При движении водителю необходимо избегать диапазонов высоких оборотов при низких нагрузках и диапазонов низких оборотов при высоких нагрузках . Поэтому будем контролить режимы:

Считаем секунда вне зеленого диапазона и штрафуем голубчика))) Кстати, зачастую водители чтобы сымитировать повышенный расход топлива, к примеру после установки ДУТ, кидает автомобиль на 10 передачу вместо 12 и едет весь день на 1600 оборотах при малой нагрузке. А тут мы его и подловим) А также здесь будут видны обгоны на скорости.
Вибрация от внешнего датчика вибрации на раме
Этим параметром мы будим приучать водителей бережно относиться к авто и тормозить на лежачих полицейских и ямах в колено.
Способ реализации алгоритма: Устанавливаем внешний датчик вибрации на раме и проезжаем спящий на 20 км/ч, и удар в средненькую яму на скорости 60км/ч. Смотрим показания датчика, определяемся с какой-то критической величиной и все последующие колебания свыше этого значения штрафуем
10,0 – 0 ударов за рейс
9,00 – 2 удара за рейс
8,00 – 4 удара за рейс
Внутренний акселерометр в данном случае не подойдет, т.к. спящие на скорости 60 км/ч пневмоподвеска рама+кабина глотает. А вот колеса становятся квадратными!
P.S.. В заключении нужно сказать, что, анализируя и влияя на водителей в рамках этих критериев возможно максимально минимизировать негативное влияние водителя на расход топлива. Однако не стоит забывать, что помимо стиля вождения на расход также влияет и техническое состояние транспортного средства, и в борьбе за экономию топлива необходимо должное влияние уделять также и техническому состоянию ТС.
Приведу небольшой пример: при закоревании направляющих тормозного суппорта одного из колес на ведущей оси, расход топлива за рейс Минск, РБ-Вольфсбург, Германия – Минск, РБ вырос с 24,9 до 29,2 л/100км. Наш менее опытный водитель даже не заметил ничего неладного в пути, т.к. ступица ведущей оси рассеивает тепло через бортовую и масло моста, и колесо грелось сильнее остальных, но не критично больше, а опытный водитель в следующем рейсе жаловался на слабый накат автопоезда и легкий запах паленых колодок после длительного вождения. И стоит отметить, что используемая смазка в направляющих, имеет срок службы 36 месяц, после чего она высыхает и теряет свои свойства.
Но как видим не каждый водитель способен увидеть данные тонкие проблемы, и, следовательно, человеческий фактор необходимо по максимум исключать в нашей работе!)
Самый главный вопрос – почему стоит прислушиваться к нашему мнению?
Наша компания заняла 1 место в Mercedes-Benz FleetBoard Driver’s League среди стран СНГ.
Среднегодовой расход по автопарку за 2020 год 24,6 л/100 км (14 машин, 130-140 т.км пробега на каждый грузовик, 27 водителей)
2. Данные алгоритмы не нацелены на некую коренную ломку принципов управления автомобилем в угоду экономичности. Мы используем данную методику уже более трех лет. Она позволяет оценивать навыки управления автомобилем каждого водителя в отдельности на всем протяжении пути в автоматическом режиме. За счет чего можно видеть слабых водителей, проводить с ними работу над ошибками. Водители, имеющие высокий уровень профессионализма, с первых рейсов показывают высокие баллы вождения и приличные результаты экономичности. Но как показала практика далеко не всех водителей, порой даже с приличным стажем вождения, можно отнести к профессионалам) Матерые ребята со скепсисом выслушивают все условия и говорят пффф. кого ты лечишь. и показывают уровень! ) Но с каждым годом, доля водителей со слабыми профессиональными навыками растет все больше и больше.
Каждый день на дорогах нашей страны увеличивается количество автомобилей, следовательно, растет и количество ДТП. В статье представлен анализ психофизических особенностей человека, которые развиваются при управлении автомобилем на большой скорости. Не корректный выбор скорости, при управлении автомобилем, нарушение скоростного режима, являются одной из наиболее частых причин ДТП. При увеличении скорости не каждый водитель осознает возможные последствия своих действий, огромное значение имеет сознательность самих участников движения.

Управляя автомобилем, водитель должен постоянно оценивать обстановку движения, принимать правильное решение и соответствующим образом воздействовать на органы управления автомобилем.
Точность, скорость и надежность этих процессов и действий, а значит, и мастерство вождения автомобиля зависят от личных качеств и навыков водителя. Чтобы хорошо управлять автомобилем, каждый водитель должен знать уровень развития своих качеств, от которых зависит быстрая оценка дорожной обстановки, принятие правильного решения и его своевременное выполнение.
Водителю необходимо зрительно оценивать положение автомобиля на дороге, направление и скорость движения, положение и расстояние до предметов. Важнейший для водителя орган зрения – глаз позволяет различать предметы, их цвет и свойства, определять расстояние до них.
Основным условием зрительного восприятия предмета является выделение его из фона. Такое выделение затрудняется при слабом освещении, одинаковой окраске предмета и фона, ослеплении глаз ярким светом или при въезде с освещенной улицы в темный проезд.
Когда человек смотрит двумя глазами, поля зрения правого и левого глаза совмещаются, и он видит перед собой определенное пространство, ограничиваемое горизонтальным углом зрения (обзорностью) которая составляет около 160—180 °. Объекты, находящиеся близко, в центре поля зрения и на небольшом расстоянии от него, рассматриваются более четко, и человек способен наиболее точно определить размеры, особенности объектов и расстояние до них [1].
Далее на рис. 1 изображено поле зрения водителя в градусах.
Бинокулярное зрение – дает возможность четко видеть предмет и точно определять расстояние до него.
Периферийное зрение – обеспечивает ориентацию человека в пространстве, дает возможность видеть во тьме и полутьме [2].
На рис. 2 представлено поле зрения водителя в зависимости от скорости движения.
При неподвижном положении тела и глаз поле зрения в горизонтальной плоскости составляет 120 градусов. При скорости 20 км/ч поле зрения сужается до 80 градусов, при 40 км/ч – до 45 градусов, при 80 км/ч – до 30 градусов, при 100 км/ч – до 22 градусов, при 160 км/ч – до 5 градусов. За пределами этих секторов водитель ничего увидеть не может. В результате увеличивается опасность столкновения или наезда на объекты, которые перемещаются с обочины дороги к ее центру.
Также нужно учесть, что когда два автомобиля на большой скорости движутся на встречу друг другу, то вследствие сужения поля зрения водители не видят встречные автомобили. При увеличении скорости увеличивается дальность сосредоточения взгляда на дороге. Если при скорости 50-60 км/ч достаточно фиксировать взгляд на 150-180 м., чтобы рассмотреть объект на дороге, то при скорости 140-160 км/ч это расстояние увеличивается до 640-720 метров [3].
На рис. 3 изображено поле зрения водителя при скорости 120 км/ч.
При движении с этой скоростью водитель не в состоянии видеть встречную машину на расстоянии ближе 30-ти метров от себя.
При вождении автомобиля водитель набирает опыт, со временем у него притупляется страх от управления, он становится более самоуверенным.
Существует много различных заблуждений водителей связанных с психофизическими особенностями управления автомобилем, вот самые популярные и опасные заблуждения:
На большой скорости автомобиль лучше реагирует на руль;
Это не так, просто автомобиль на большой скорости проезжает большее расстояние за ту же единицу времени, что и на меньшей. Особенно это заблуждение опасно при поворотах на высокой скорости.
Высокая скорость помогает не заснуть ночью;
На большой скорости внимание обостряется, и человек может реагировать моментально.
Очень распространенное заблуждение, к тому же очень опасное. Такой эффект достигается за счет того, что на высокой скорости человек концентрируется на одной точке перед собой, в то время как в другие он смотрит в 10-15 раз реже, чем на меньшей скорости [4].
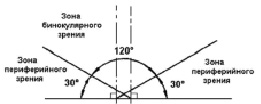
Рис. 1. Поле зрения
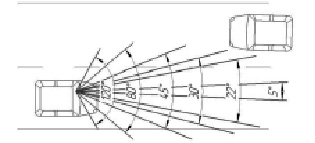
Рис. 2. Поле зрения от скорости
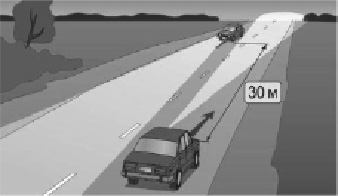
Рис. 3. Поле зрения при скорости 120 км/ч
Итак, водитель (гонщик) управляет машиной взглядом. Он смотрит туда, где хочет оказаться, и его руки, в нужный момент поворачивают руль на нужный угол, и машина попадает точно в цель. Но водитель смотрит уже на следующий ориентир, и опять его руки направляют автомобиль в нужном направлении. Идет как бы сканирование пространства впереди автомобиля, причем если водитель смотрит недостаточно далеко, то возникшие препятствия станут для него неожиданностью и среагировать на них своевременно будет трудно. Если же сфокусировать взгляд слишком далеко, то из поля зрения выпадут фрагменты дороги непосредственно перед капотом.
Сканировать пространство взглядом учат военных летчиков: взгляд по горизонту слева направо, затем – контролирование показаний приборов, затем взгляд вверх и вперед, снова приборы, взгляд от носа самолета к горизонту и так далее. Водитель делает, по сути, то же самое.
Значит, оптимальным вариантом будет постоянное ведение взгляда, согласованное со скоростью автомобиля по направлению от капота автомобиля и далее вперед, причем фокус взгляда не должен задерживаться на конкретных ориентирах, а все время скользить ближе – дальше и так далее. При этом периферийным, или боковым, зрением постоянно должна контролироваться вся зона видимости перед автомобилем. И не только она, но еще и зеркала заднего вида и показания приборов [5].
А теперь подытожим вышесказанное:
1. Первая и, пожалуй, самое важное заключается в том, что управляем автомобилем необходимо глазами;
2. Второй и не менее важный момент говорит о том, что в распоряжении гонщика есть всего пять органов управления автомобилем: руль, рычаг переключения скоростей, педали тормоза, газа и сцепления. От того, как водитель будет обращаться с ними, зависит, как будет ехать автомобиль. Это инструменты, при помощи которых на автомобиль начинают действовать всевозможные силы и ускорения, т.е. гонщик своими действиями загружает или разгружает переднюю и заднюю оси или одно из колес автомобиля. Во всяком случае, именно так воспринимал бы это сам автомобиль, если бы умел чувствовать.
Выезжая на трассу, гонщик каждый раз проверяет себя, пробует, насколько он готов к тому, чтобы себе самому продемонстрировать мастерство и получить свежий опыт, новые эмоции. Здесь нет встречных машин, пешеходов и непредвиденных препятствий, и никто не мешает показать отличный результат. Здесь гонщик находится наедине с машиной и проверяет её возможности
Если спросить у любого гонщика высокого уровня о его мастерстве, то услышите в ответ, что он постоянно совершенствуется, учится. Учится на своих и чужих ошибках, которых совершается великое множество.
Управление автомобилем на больших скоростях требует от водителя большого мастерства и высокого чувства машины
Движение на больших скоростях опасно также и потому, что в 2-3 раза возрастает время реакция водителя и одновременно увеличивается остановочный путь, который проходит автомобиль за это время.
Так же нужно помнить, что дефекты зрения или усталость глаз, снижают реакцию, тем самым увеличивая время до принятия решения водителем.
Специалисты сервисов СберАвто и СберУслуги проанализировали самые частые ошибки на зимней дороге, которые совершают автомобилисты, а также дали советы, как этого избежать. При этом эксперты уточняют, что чаще всего к аварийным ситуациям приводят неправильные действия новичков за рулем. Для тех, кто только недавно получил водительские права и еще не уверенно чувствует себя за рулем зимой, рекомендовано взять несколько уроков у инструктора.
Безопасная дистанция
По мнению экспертов, самое главное на заснеженной дороге — это соблюдение безопасной дистанции, особенно в начале зимы, когда снежный покров не лег, но дороги уже стали мокрыми и скользкими. Особенно вечером и рано утром.
Однако многие автомобилисты об этом забывают и едут слишком близко к впереди идущему автомобилю. При этом чем больше дистанция, тем больше у водителя шансов избежать столкновения в случае резкого торможения или другой нештатной ситуации.
Сообщается, что безопасной считается дистанция длиной пути машины в 3-5 секунд. Чтобы ее рассчитать, нужно выбрать любой неподвижный объект. Когда задний бампер идущего впереди автомобиля проедет его, нужно начинать отсчет. Заканчивать считать можно когда водитель проезжает мимо этого объекта. Полученный результат и будет дистанцией.
Скорость
Для безопасной езды нужно также выбирать правильный скоростной режим. На скользкой дороге, особенно в случае гололеда. Так, если на дороге гололед, то небезопасно ехать в разрешенной скоростью 80 км/ч.
Торможение
Резкое торможение опасно даже летом на сухой дороге, но зимой оно может стать причиной дорожно-транспортного происшествия. Дело в том, что зимой дорога часто оказывается скользкой, так что тормозной путь будет гораздо больше. Так что тормозить начинать нужно раньше.
Помимо этого, тормозной путь увеличивается на расчищенном и залитом реагентами асфальте, если на автомобиле установлены шипованные шины.
Маневры и перестроения
Еще одна частая водительская ошибка — резкие маневры. Зимой они должны быть плавными, так как любое резкое движение или поворот руля могут привести к заносу автомобиля.
Специалисты советуют держать руль двумя руками, так как движения получаются более плавными. Помимо этого, важно помнить об опасности поворотов: для собственной безопасности не стоит ускоряться, тормозить или доворачивать рулевое колесо.
Также автомобилистам рекомендовано отказаться от перестроений и двигаться в пределах одной полосы. Это позволит обеспечить максимальное сцепление с дорогой. Не лишним будет отказаться от обгона на заснеженной дороге.
Шиномонтаж
Специалисты отмечают, что нередко пренебрегают сроками сезонного шиномонтажа владельцы шипованных покрышек, которые стараются сохранить все шипы на месте. Однако производители резины понимают, что шипы стираются об асфальт и делают их из достаточно твердого сплава.
Лень
Свет
Напрямую влияют на безопасность фары. Когда головная оптика покрыта слоем грязи, светят они намного хуже. В результате водитель может попросту не увидеть опасность.
Кстати, для очищения светотехники тоже есть ряд правил. Например, не стоит протирать их сухой тряпкой, так как от этого рассеиватель царапается и фары становятся матовыми.
Занос
Если автомобиль все же занесло в повороте, эксперты рекомендуют придерживаться нескольких простых правил. Так, на заднеприводных автомобилях нужно сбросить, но не полностью отпустить газ, а руль повернуть в сторону заноса. На переднем приводе педаль газа, наоборот, нужно выжать максимально. Это загрузит ведущие колеса. Одновременно водителю нужно держать руль по ходу движения.
При езде на полноприводной машине ориентироваться нужно на ведущую ось, так как на подключение второй уйдет несколько секунд.
Помимо этого, вне зависимости от привода автомобиля, важно помнить главное: ни в коем случае не тормозить. Иначе машину может попросту развернуть.
Повышение квалификации
Начинающим водителям, которые пока неуверенно чувствуют себя за рулем, специалисты советуют обратиться к инструктору. За несколько занятий можно получить все необходимые знания об особенностях езды зимой, а также получить базовые навыки для экстренной ситуации.
Эта первая статья из небольшой серии посвященной положительному и отрицательному влиянию скорости на нашу жизнь. Все статьи для сжатия материала будут представлены в виде тезисов.
Но сначала о самом наболевшем – о безопасности. Как известно в России в год гибнет в ДТП 1 человек из 6 000. Разберемся, как скорость влияет на количество ДТП и вероятность смертельного исхода. Основной упор будет сделан на взаимодействие пешехода и автомобиля, как наиболее сильно конкурирующих объектов дорожного движения.

Скорость и вероятность ДТП
Рассмотрим тормозной путь автомобиля. Длину тормозного пути можно рассчитать, зная время реакции водителя и длину тормозного пути после нажатия на тормоз.
Среднее время реакции составляет 1 секунду. При увеличении скорости движения увеличивается и пройденное за 1 секунду расстояние. Расстояние, пройденное с момента нажатия педали до полной остановки, пропорционально квадрату скорости. При увеличении скорости с 50 км/ч до 80 км/ч тормозной путь увеличивается в 2 раза. Соответственно избежать столкновения намного тяжелее.
Необходимо также учитывать, что на сыром асфальте тормозной путь увеличивается на 25%. То есть тормозной путь автомобиля с 60 км/ч на сыром асфальте будет равен тормозному пути на 70 км/ч на сухом асфальте.
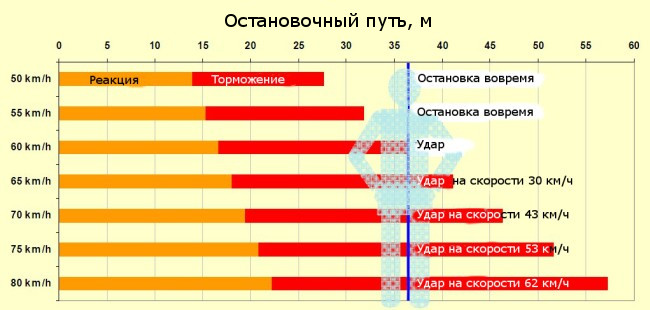
При скорости автомобиля 80 км/ч время реакции в пересчете на дистанцию займет 22 метра. Дополнительно на сухом асфальте водителю потребуется минимум 36 метров для полной остановки.
Если ребенок выбежит на дорогу перед водителем на расстоянии 36 метров, то почти наверняка он умрет при начальной скорости автомобиля 70 км/ч, получит увечья при скорости автомобиля 60 км/ч, а при скорости автомобиля 50 км/ч водитель избежит столкновения.
Но если ребенок выбежит на дорогу за 15 метров перед автомобилем, он, скорее всего, получит смертельные травмы, даже если автомобиль двигается со скоростью 50 км/ч.
Рассчитать длину тормозного пути и время торможения, а также скорость во время торможения на определенном расстоянии после начала торможения при различных условиях (начальная скорость, время реакции, тип покрытия) можно на этом немецком сайте.
Скорость и частота ДТП
Проектные и функциональные характеристики дорог сильно влияют на зависимость между скоростью и частотой аварий. Влияет, например, наличие и вид пересечений, присутствие пешеходов и велосипедистов.
В более сложных ситуациях риски аварий и влияния скорости больше.
Скоростные магистрали, например, это простые случаи с меньшими рисками аварий. Городские дороги, наоборот, более комплексные с более высокими рисками ДТП.
Основными жертвами ДТП в городских условиях являются пешеходы, велосипедисты, мотоциклисты. Основные факторы, способствующие этому – разница в скорости и в весе.
В южной Австралии проводили сравнение между рисками из-за превышения скорости с рисками из-за содержания алкоголя в крови. Было принято, что при 60 км/ч и 0 промилле относительные риски равны единице.

С 70 км/ч относительные риски начинают резко расти. Это превышение всего на 10 км/ч и соответствует 0.8 промилле алкоголя в крови при 60 км/ч.
Влияние неоднородности скорости на ДТП
Неоднородность скорости в транспортном потоке приводит к увеличению количества обгонов и, как следствие, более высокому уровню рисков. Высокий разброс скоростей тесно связан с авариями со смертельным исходом на всех дорогах - городских и загородных.
Чаще всего снижение скорости приводит к снижению неоднородности скоростей в потоке.
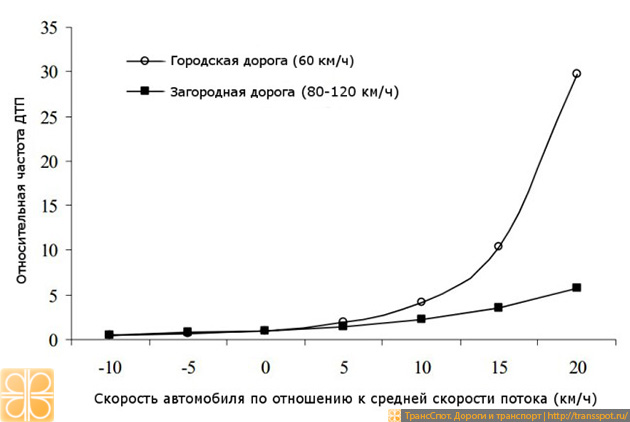
Частота аварий вырастает на 10-15% при превышении средней скорости на 1 км/ч. При превышении средней скорости потока на 10 и более км/ч количество аварий начинает резко расти для городских дорог. Для загородных дорог рост количества аварий не настолько критичен.
Из графика также видно, что уменьшение скорости отдельного автомобиля относительно средней скорости потока не приводит к увеличению числа аварий.
Влияние скорости на тяжесть ДТП
Даже если превышение скорости не является основной причиной аварии, от скорости в момент столкновения сильно зависит тяжесть последствий ДТП. Приблизительная зависимость количества тяжелых аварий и аварий со смертельным исходом от изменения скорости движения представлена на графике.

Повышение скорости на 10% приводит к увеличению количества всех аварий на 21%, к увеличению количества тяжелых аварий или аварий со смертельным исходом на 33%, к увеличению количества аварий со смертельным исходом на 46%. Снижение скорости на 10% - к уменьшению этих видов аварий на, соответственно, 19%, 27% и 34%.
Ситуация сильно зависит от типа дороги и допустимой скорости на этих дорогах. На графике ниже представлен прирост ДТП при изменении скорости движения на 1 км/ч для различных скоростей движения.

Наиболее серьезное влияние на тяжесть аварии при изменении скорости, как видно из таблицы, приходится на дороги с низкими допустимыми скоростями. Это городские дороги.
Тяжесть последствий сильно зависит от участников дорожного движения. Пешеходы, велосипедисты и мотоциклисты имеют большой риск получения серьезных травм, так как они не защищены. У них нет металлического каркаса, ремней и подушек безопасности.
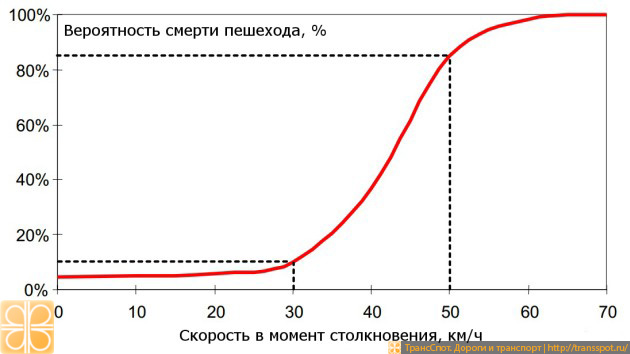
Вероятность гибели пешехода в ДТП увеличивается с ростом скорости столкновения. Расследования показали, что при столкновении с пешеходом на скорости 30 км/ч 90% пешеходов выживают, в то время как столкновения на скорости 50 км/ч приводят к гибели 80% пешеходов.
Водитель и пассажиры автомобиля при этом практически не страдают.
Влияние скорости на область обзора
При увеличении скорости движения область обзора существенно уменьшается. Таким образом, высокая скорость в городских условиях не дает водителю возможность правильно спрогнозировать ситуацию, потому что он не видит окружающую обстановку.
На скорости 40 км/ч угол обзора водителя составляет 100 градусов. Это позволяет видеть препятствия на дороге, а также оценивать ситуацию справа и слева от дороги. На скорости 130 км/ч угол обзора составляет 30 градусов и менее, что значительно снижает возможность оценки водителем потенциальной опасности.

Выводы
Высокая скорость является причиной трети всех ДТП. Кроме того, высокая скорость отягчает последствия ДТП, произошедших по другим причинам.
Влияние скорости на несчастные случаи особо серьезно в городах, где имеет место взаимодействие нескольких групп участников дорожного движения: автомобили, пешеходы, велосипедисты.
Существует порог скорости автомобиля, выше которого организм пешехода физически не может выжить. При столкновении на скорости 45 км/ч выживает только 50 % пешеходов.
Для снижения травматизма на дорогах необходимо принять меры для соблюдения обоснованного скоростного режима, а также свести к минимуму разброс скорости в потоке.
Читайте также: