
Простой преобразователь частота напряжение для тахометра схема
Обновлено: 07.07.2024
В этой статье предлагаю вашему вниманию рассмотрение простейшей электронной схемы преобразователя, позволяющий получать высокое напряжение на выходе. Сама же схема собрана всего на трех электронных компонента. Это импульсный трансформатор с ферритовым сердечником, полевой транзистор и резистор. Схема высоковольтного преобразователя напряжения приведена ниже на рисунке.
В данной схеме важно правильно намотать импульсный трансформатор. Поскольку именно от качественной его намотки и сборки зависит насколько хорошо будет работать этот преобразователь напряжения. Поскольку мы имеем дело с относительно высоким напряжением, а это где-то порядка нескольких киловольт, то неправильная намотка может привести к быстрому пробою изоляции трансформатора и последующему выходу его из строя.
Итак, нам понадобится Ш-образный ферритовый сердечник, имеющий каркас. Для примера я взял сердечник от старого компьютерного блока питания. Его размеры – 33мм*28мм*12мм.
Чтобы разобрать подобный трансформатор, не повредив ферритовый сердечник, его нужно минут на 5-10 погрузить в кипящую воду. После этого половинки ферритового сердечника легко можно отсоединить друг от друга. Они изначально склеены и простым усилием вы можете только повредить этот сердечник (он хрупкий).
Когда же уже ферритовый сердечник разобран, и с каркаса снята вся имеющаяся намотка, то можно теперь приступать к новой намотке нужного количества витков. На рисунке со схемой нарисовано, что первичная обмотка содержит 8 витков, и она разделена на две части (каждая имеет по 4 витка). Диаметр провода первичной обмотки можно взять где-то в районе 1 мм. Причем лучше первичку мотать шиной, то есть из нескольких более тонких проводов (допустим 2 жилы, каждая по 0,5 мм).
Также обязательно нужно делать изоляцию между слоями обмоток. Итак, чтобы сразу намотать обе части первичной обмотки мы берем допустим 4 жилы, каждая из которых диаметром по 0,5 мм. Сразу все 4 жилы и наматываем на каркасе трансформатора. Делаем 4 витка. Далее мы 2 жили будем использовать как одна часть первичной обмотки, и две других жилы будут второй частью первички. То есть, когда полностью будут намотаны все обмотки (и первичная и вторичная), мы отсоединим жилы первичной обмотки и спаяем их нужным образом.
Далее мы делаем слой изоляции, который отделит первичную обмотку от вторичной. И ее обязательно нужно делать качественно, поскольку высокое напряжение вторичной обмотки легко может пробить себе путь через наиболее короткое расстояние, где не будет изоляции. То есть, между первичной и вторичной обмоткой может возникнуть электрическая дуга, которая испортит весь трансформатор, сделав его не пригодным для дальнейшего использования в преобразователе.
Как правильно сделать изоляцию между слоями обмоток в импульсном трансформаторе для высоковольтного преобразователя
Как правильно сделать изоляцию между слоями обмоток в импульсном трансформаторе для высоковольтного преобразователя
Теперь на слой изоляции начинаем наматывать вторичную, повышающую обмотку. Она содержит 1800 витков медного изолированного провода диаметром около 0,1 мм. Думаю должно быть понятно, что чем больше витков содержит вторичная обмотка, тем выше мы получим выходное напряжение. Но, слишком большое напряжение опасно тем, что оно легко может пробивать слабые места в изоляции трансформатора, что выведет его из строя. Это обязательно учтите.
Важным моментом при намотке вторичной обмотки является также хорошая изоляция мест соединения выводов самой обмотки с проводами, что будут выходить наружу (сами выводы вторичной обмотки).
После того, как трансформатор намотан, можно приступать к пайке схемы высоковольтного преобразователя напряжения. Для тех, кто не понял где какие выводы у полевого транзистора, то вот подсказка на картинке ниже.
Для того, чтобы сделать отвод от середины в нашем повышающем импульсном трансформаторе на первичной обмотке мы конец одной части этой первички соединяем с концом второй части этой первички. Естественно, пары проводов первичной обмотке предварительно нужно вызвонить мультиметром, электронным тестером.
Схема этого высоковольтного преобразователя питается от напряжения 5 вольт постоянного тока. Сила потребляемого тока может достигать до десятка ампер (обычно это до 10 А, и это зависит от режима работы самой схемы, размеров конкретного трансформатора, рабочей частоты и т.д.). Полевой транзистор желательно прикрутить к небольшому радиатору, поскольку он будет нагреваться. Чем больше напряжение мы подадим на схему (более 5 вольт), тем сильнее может быть нагрев транзистора.
Сама схема полностью рабочая. Вот видео по этой теме.
Импульсный трансформатор для данной схемы преобразователя можно делать из разных типов сердечников (гантели, кольца, Ш-образный сердечник с зазором и без него), при этом будет также разный режим работы этого устройства. Если есть желание и возможность, то попробуйте эту схему собирать на разных трансформаторах и выбирать наилучший вариант.
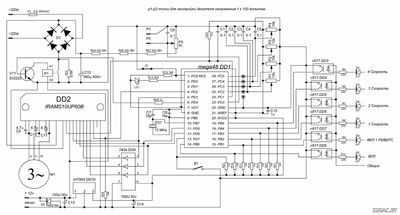
В данной статье речь пойдет о частотном преобразователе, в простонародье, частотнике. Данный частотник, а в дальнейшем частотный привод, способен управлять 3-х фазным асинхронным двигателем. В данном частотном приводе (ЧП) я использую интеллектуальный силовой модуль компании International Rectifier, а конкретно IRAMS10UP60B (на AliExpress), единственное, что с ним сделал, это перегнул ножки, так что, по сути, модуль получился IRAMS10UP60B-2. Выбор на данный модуль пал преимущественно из-за встроенного драйвера. Главной особенностью встроенного драйвера является возможность использования 3 ШИМ вместо 6 ШИМ каналов. Кроме того цена на данный модуль на eBay около 270 рублей. В качестве управляющего контроллера использую ATmega48.
Разрабатывая данный привод я делал упор на эффективность конструкции, минимальную себестоимость, наличие необходимых защит, гибкость конструкции. В результате получился частотный привод со следующими характеристиками (функциями):
На данный момент защита от сверх тока или кз не реализованы (считаю нет смысла, хотя, свободную ногу в МК с прерыванием по изменению оставил)
Собственно, схема данного девайса :
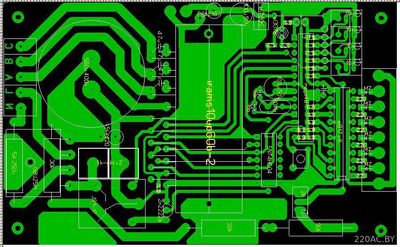
Проект в layout
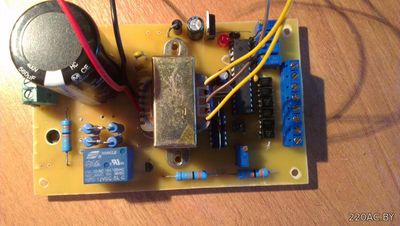
Ниже фото того, что у меня получилось
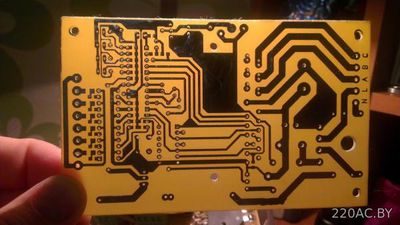
Печатная плата данного девайса (доступна в lay под утюг)

На данном фото полностью рабочий экземпляр, проверенный и обкатанный (не имеет панельки расположен слева). Второй для теста atmega 48 перед отправкой (расположен справа).
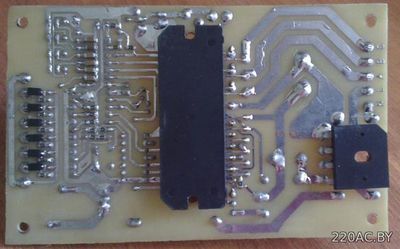
На данном фото тот самый irams (делал с запасом, должен поместится iramx16up60b )
Алгоритм работы устройства
Изначально МК (микроконтроллер) является настроенным на работу с электродвигателем номинальным напряжением 220 В при частоте вращающего поля 50Гц (т.е. обычный асинхронник, на котором написано 220 в 50 Гц). Скорость набора частоты установлена на уровне 15 Гц/сек.(т.е. разгон до 50 гц займет чуть более 3 сек., до 150 Гц-10 сек ). Вольт добавка установлена на уровне 10 %, длительность намагничивания 1 сек. (постоянная величина неизменна ), длительность торможения постоянным током 1 сек. (постоянная величина неизменна). Следует отметить ,что напряжение при намагничивании, как и при торможении, является напряжением вольт добавки и меняется одновременно. К слову, преобразователь частоты является скалярным, т.е. с ростом выходной частоты увеличивается выходное напряжение.
После подачи питания происходит заряд емкости dc звена. Как только напряжение достигает 220В (постоянное ) с определенной задержкой включается реле предзаряда и загорается единственный у меня светодиод L1. С этого момента привод готов к запуску. Для управления частотником имеется 6 входов:
- Вкл (если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5 Гц)
- Вкл+реверс(если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5 Гц, но в другую сторону)
- 1 фиксированная частота (задается R1)
- 2 фиксированная частота (задается R2)
- 3 фиксированная частота (задается R3)
- 4 фиксированная частота (задается R4)
В этом управлении есть одно Но. Если в процессе вращения двигателя менять задание на резисторе, то оно изменится лишь после повторной подачи команды (вкл.) или (вкл+реверс.). Иначе говоря, данные с резисторов читаются пока отсутствуют эти два сигнала. Если планируется регулировать скорость с помощью резистора в процессе работы, то необходимо установить джампер J1.В этом режиме активен лишь первый резистор, причем резистор R4 ограничивает максимальную частоту, то есть если его выставить на 50% (2.5 вольта 4 "штырь". на фото ниже 5 земля), то частота R1 будет регулироваться резистором от 5 до 100 Гц.
Для задании частоты вращение нужно учитывать, что 5v на входе в МК соответствует 200 Гц., 1v-40 Гц, 1.25v-50 Гц и т.д. Для измерения напряжение предусмотрены контакты 1-5, где 1-4 соответствуют номерам резисторов, 5- общий минус(на фото ниже). Резистор R5 служит для подстройки масштабирования напряжения DC звена 1 в -100 в (на схеме R30).

Особенности настройки
Настройка привода перед первым включением сводится к проверке монтажа электронных компонентов и настройки делителя напряжения для DC звена (R2).
100 Вольтам DC звена должно соответствовать 1 вольт на 23 (ножке МК)- это ВАЖНО. На этом настройка завершена.
Перед подачей сетевого напряжения необходимо промыть плату (удалить остатки канифоли) со стороны пайки растворителем или спиртом, желательно покрыть лаком.
Привод имеет "заводские " настройки, которые подходят как для двигателя с напряжением 220 В и частотой 50 Гц), так и для двигателя с напряжением 380 в и частотой 50 гц. Данные настройки всегда можно установить если вы не решаетесь сами настраивать привод. Для того чтобы установить "заводские " настройки для двигателя (220 в 50 Гц) :
- Включить привод
- Дождаться готовности (если подано питание только на МК , просто подождать 2-3 секунды)
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод L1 не начнет мигать, отпустить кнопку В1
- Подать команду выбора 1 скорости. Как только светодиод перестанет мигать, убрать команду
- Привод настроен . В зависимости от того . светодиод горел (если не горел, то привод ожидает напряжения на DC звене).
При такой настройке автоматически в записываются следующие параметры:
- Номинальная частота двигателя при 220 В - 50 Гц
- Вольт добавка (напряжение намагничивания, торможения ) - 10%
- Интенсивность разгона 15 Гц./сек
- Интенсивность торможения 15 Гц./сек
Если подать сигнал выбора второй скорости, то в EEPROM запишутся следующие параметры (разница лишь в частоте):
- Номинальная частота двигателя при 220 В- 30 Гц
- Вольт добавка (Напряжение намагничивания, торможения ) 10%
- Интенсивность разгона 15 Гц./сек
- Интенсивность торможения 15 Гц./сек
Наконец, третий вариант Настройки:
- Нажать на кнопку В1 и держать
- Дождаться, когда светодиод начнет мигать
- Отпустить кнопку В1
- Не подавать напряжение на входа выбора 1-ой или 2-ой скорости
- Задать параметры подстроечными резисторами
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод не начнет моргать
Таким образом, до тех пор, пока светодиод мигает, привод находится в режиме настройки. В этом режиме при подаче входа 1-ой или 2-ой скорости в EEPROM записываются параметры. Если не подавать напряжение на входа выбора 1-ой или 2-ой скорости, то фиксированные параметры в EEPROM не запишутся, а будут задаваться подстроечными резисторами.
- Резистор задает номинальную частоту двигателя при 220 В ( Так, например, если на двигателе написано 200 Гц /220 то резистор нужно выкрутить на максимум; если написано 100 Гц/ 220 в нужно добиться 2.5 Вольта на 1-ом контакте. (1 Вольт на первом контакте соответствует 40 Гц); если на двигателе написано 50 Гц/400 В то нужно выставить 27 Гц/0,68 В (например:(50/400)*220=27 Гц )так, как нам необходимо знать частоту двигателя при 220В питания двигателя. Диапазон изменения параметра 25 Гц - 200 Гц.(1 Вольту на контакте 1-ом соответствует 40 Гц)
- Резистор отвечает за вольт добавку. 1 Вольт на 2-ом контакте соответствует 4% напряжения вольт добавки (мое мнение выбрать на уровне 10% то есть 2.5 вольта повышать с осторожностью) Диапазон настройки 0-20% от напряжения сети (1 Вольту на контакте 2-ом соответствует 4%)
- Интенсивность разгона 1 В соответствует 10 Гц/сек (на мой взгляд оптимально 15 -25 Гц/сек) Диапазон настройки 5 Гц/сек - 50 Гц/сек. (1 вольту на контакте 3-ом соответствует 10 Гц/сек)
- Интенсивность торможения 1 В соответствует 10 Гц/сек (на мой взгляд оптимально 10 -15 Гц/сек) Диапазон настройки 5 Гц/сек - 50 Гц/сек. (1 вольту на контакте 4-ом соответствует 10 Гц/сек)
После того, как все резисторы выставлены нажимаем и держим кнопку В1 до тех пор пока светодиод не перестанет мигать. Если светодиод моргал и загорелся, то привод готов к запуску.Если светодиод моргал и НЕ загорелся, то ждем 5 секунд, и только потом отключаем питание от контроллера.
Ниже представлена вольт-частотная характеристика устройства для двигателя 220 в 50 Гц с вольт добавкой в 10 % .
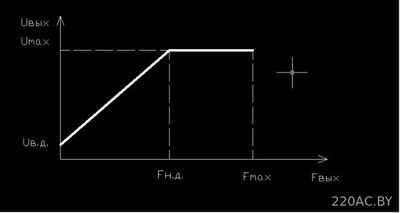
- Uмах- максимальное напряжение, которое способен выдать преобразователь
- Uв.д.- напряжение вольт добавки в процентах от напряжении сети
- Fн.д.- номинальная частота вращения двигателя при 220 В . ВАЖНО
- Fmax- максимальная выходная частота преобразователя.
Еще один пример настройки
Предположим, у вас имеется двигатель, на котором указана номинальная частота 50 Гц , номинальное напряжение 80 В, Чтобы узнать какая будет номинальная частота при 220 В необходимо: 220 В разделить на номинальное напряжение и умножить на номинальную частоту (220/80*50=137 Гц). Таким образом, мы получим,что напряжение на 1 контакте (резисторе) нужно выставить 137/40=3,45 В.
Симуляция в протеусе разгон 0-50 Гц одной фазы (на 3-х фазах зависает комп )
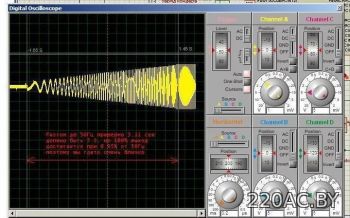
Как видно из скриншота с ростом частоты увеличивается амплитуда синуса. Разгон занимает примерно 3.1 сек.
По поводу питания
Рекомендую использовать трансформатор, так как это самый надежный вариант. На моих тестовых платах нет диодных мостов и стабилизатора для igbt модуля 7812. Для скачивания доступны две печатные платы. Первая та которая представлена в обзоре. Вторая имеет незначительные изменения, добавлен диодный мостик и стабилизатор. Защитный диод ставить обязательно P6KE18A или 1.5KE18A ставить обязательно.
Пример размещения трансформатора, как оказалось найти совсем нетрудно.
Какой двигатель можно подключить к данному преобразователю частоты?
Все зависит от модуля. В принципе можно подключить любой, главное, чтобы его сопротивление для модуля irams10up60 было более 9 Ом. Нужно учесть, что модуль irams10up60 рассчитан на маленький импульсный ток и имеет встроенную защиту на уровне 15 А Этого очень мало. Но для двигателей 50 Гц 220 В 750 Вт, этого за глаза. Если у вас высокооборотистый шпиндель, то скорее всего он имеет маленькое сопротивление обмоток. Данный модуль может пробьет импульсным током. При использовании модуля IRAMX16UP60B (ножки придется загнуть самостоятельно) мощность двигателя по даташиту возрастает с 0.75 до 2.2 кВт.
Главное у данного модуля: ток короткого замыкания 140 А против 47 А, защита настроена на уровне 25 А. Какой модуль использовать решать вам. Нужно помнить что на 1 кВт необходимо 1000 мкФ емкости dc звена.
По поводу защиты от КЗ. Если у привода сразу после выхода не ставить сглаживающий дроссель (ограничивает скорость нарастания тока) и коротнуть выход модуля, то модулю придет "хана". Если у вас модуль iramX, шансы есть. А вот с IRAMS шансов ноль, проверено.
Программа занимает 4096 кБ памяти из 4098. Все сжато и оптимизировано под размер программы по максимум. Время цикла есть фиксированная величина равная 10 мс.
На данный момент всё вышеописанное работает и испытано.
Если использовать кварц на 20 МГц, то привод получится 10-400 Гц; темп разгона 10-100 Гц/сек; частота ШИМа возрастет до 10кГц; время цикла упадет до 5мс.
Забегая вперед следующий частотный преобразователь будет реализован на ATmegа64, иметь разрядность ШИМ не 8, а 10 Бит, иметь дисплей и множество параметров.
Ниже смотрите видео настройки привода, проверки защиты перегрева, демонстрации работы (использую двигатель 380 В 50 Гц, а настройки для 220 В 50 Гц). Так сделал специально, чтобы проверить как работает ШИМ с минимальным заданием.)
Для стабилизации электрического тока используются различные устройства. Предлагаем рассмотреть, что такое электромашинный преобразователь частоты, как работает высоковольтный, тиристорный и однофазный прибор, его назначение, где можно купить, а также схема, как его сделать своими руками.
Общая информация
Простейший преобразователь напряжения тока или частоты (ПЧ) – это электромагнитный, электронный или электромеханический прибор, который преобразует переменный ток одной частоты в переменный ток другой. Устройство может также изменить напряжение, но для этого необходимо использовать специальные настройки и компоненты. На нашем рынке они представлены такими марками и типами как CSACS550, ACS800, Aqua, ATV, ATV312, ATV61, CIMR, Commander, Control, Cue, Drive, F740, Fdu40, Frenic, Frn, Fuji, Hvac, IC5, Innovert, Keb, L100, L200, L300p, Matlab, Micromaster, Mini, N100, N50, N700e, Nxs, Pr6000, Prostar, S11, Schneider, Sinamics, Smd, Unidrive, Vector, Vfs11, Winner, Yaskawa.

Фото — Цифровой преобразователь частоты
Преобразователь напряжение-частота широко используется для того, чтобы сохранить энергию механических систем, к примеру, двигателя, насоса, вентилятора и т.д. Выбираются приборы в соответствии с кривыми двигателя для обеспечения оптимальной скорости и нагрузки, транзисторный преобразователь может помочь сэкономить энергию двигателя, снижая потери энергии и увеличивая КПД. Это достигается путем преобразования фиксированной частоты входящего переменного тока напряжения в постоянный ток, а затем, варьируя частоту переконвертировать его обратно в переменное напряжение, используя биполярные транзисторы с изолированным затвором (IGBT).
Бывают преобразователи высокой частоты таких видов:
- Работающие при помощи звена постоянного тока;
- Работающие с непосредственной связью.
В основном используется первый тип электропривода, т.к. он обеспечивает двойное преобразование частоты вращения двигателя, при этом контролируется как вход сигнала, так и выход. Рассмотрим подробнее их принцип действия.

Фото — Современные преобразователи частоты
Принцип работы и характеристики
Преобразователь частоты для асинхронных двигателей работает путем преобразования входного синусоидального напряжения переменного тока в напряжение постоянного тока, а затем его изменения обратно в переменное напряжение. Это преобразование происходит с помощью либо кремниевых выпрямителей или IGBT-транзисторов. Напряжение постоянного тока включается с помощью транзисторов для создания постоянного выходного напряжения переменного тока (так называемый инвертор). Транзисторы могут включать и выключать питание, чтобы создать нужное напряжение сигнала тока, который обеспечивает питание двигателя. Частота, на которой происходит переключение (несущая), варьируется в зависимости от серии и компании, которой изготовлен преобразователь напряжения и частоты (Vacon, Mitsubishi, Toshiba, Altivar, FDU, Danfoss – Данфосс, Delta Hyundai, Emotron, ABB, Lenze, Hitachi, Siemens, Omron, Electric и т.д.)

Фото — Частотный преобразователь дельта
Статический трехфазный ПЧ имеет шесть диодов в качестве мостового выпрямителя переднего плана, которые преобразуют переменный ток в постоянный. ПЧ может также иметь 12 диодов — два комплекта на фазу (2 × 2 × 3 = 12 импульсов), или 18 диодов — три набора на фазу (3 × 2 × 3 = 18 импульсов) и т.д. Один набор диодов подается от трансформатора дельта, чтобы создать фазовый сдвиг на стороне источника переменного тока между двумя выпрямителями, чем уменьшить гармонику и отразить сигнал назад к входу напряжения.
Основные характеристики:
- Напряжение – 220-480 В;
- Защита Ip54;
- Температурный барьер для нормальной работы – от +10 до -40 градусов;
- Мощность – от 1 кВт.
Также существует двухзвенный преобразователь (ТТПТ, ТОШИБА, УХЛ4, ТПЧ, ТРИОЛ), матричный и векторный прибор, он состоит из ПЧ переменного тока и напряжения для создания нужной амплитуды. Обеспечивает пуск в течение 2 секунд от включения, дорогой, в последнее время теряет свою актуальность.
Этот ПЧ выполнен коммутацией естественного типа, оснащен отдельным источником напряжения с повышенной частотой. У него достаточно узкий круг использования, в основном это городские или квартальные электростанции.
В зависимости от области использования, нужно выбрать оптимальный преобразователь, иначе Вы не только переплатите за устройство, но и можете подвергнуть опасности жизни своих близких и работников.
Обязательно перед покупкой должна быть прочитана документация, проверена мощность и пропускные способности. Настройка и сборка преобразователей может производиться продавцом-консультантом непосредственно на месте покупки.

Фото — Двухзвенный преобразователь
Для чего нужен преобразователь: для подключения и работы лифтов (ПЧВН, ППЧВ), регулировки частоты станочного двигателя (к примеру, VLT, VFD), автомобильного мотора (Мицубиси, Opel Omega – Омега) и т.д.
Описание самостоятельного подключения
Предлагаем рассмотреть, как можно самому собрать и подключить простой самодельный инверторный преобразователь частоты для небольшого трехфазного электродвигателя в виде подробной инструкции.
Рассмотрим создание ПЧ на примере двигателя с частотой 400Гц и напряжением электрической сети 27 Вольт. Обмотки соединены в звезду, благодаря чему средняя точка каждой выведена наружу, это позволяет существенно упростить микросхему: нужно три выходных сигнала, и один выходной ключ на каждую из фаз. Электрическая схема подключения показана на фото ниже:

Фото — Схема подключения
Данное устройство состоит из таких компонентов: генератор, формирующий импульсы, ключи на составных транзисторах и электрического двигателя.

Фото — Частотный преобразователь схема 1
Руководство, по которому можно подключить преобразователь частоты двигателя, имеет вид упрощенной схемы. На чертеже изображен двигатель, который управляется несколькими ключами. Механические контакты показаны как элементы полупроводникового типа. Питается двигатель при помощи постоянного напряжения. Естественно нельзя одновременно открывать нижние и верхние ключи, иначе произойдет короткое замыкание, и мощность ВПЧ потока упадет до нуля, чтобы это предотвратить, нужно подключить преобразователь таким образом, чтобы при открытии нижнего ключа верхний закрывался. Для осуществления такой технологии используются специальные контроллеры, образующие мертвую зону.
Временной интервал для мертвой зоны нужно рассчитать таким образом, чтобы гарантировать успешное закрытие всех транзисторов верхнего ряда, только тогда вероятность образования сквозных токов будет сведена к минимуму.
Ключами с гальванической связью управляет драйвер на составном резисторе, для этого часто устанавливают дополнительный оптрон для каждого ключа или канала (как и показано на схеме), эта деталь на данном чертеже выполняет роль еще одного инвертора.
Чтобы питать каждый драйвер, нужно использовать специальный выпрямитель, который в свою очередь, запитан от обмотки привода. Возможно, это является одним из недостатков схемы. Для управления длительности мертвой зоны данный преобразователь напряжения и частоты использует конденсатор.
Этот прибор относится к типу универсал, его можно подсоединять к любым двигателям, мощность которые не превышает 10 кВт.
Ремонт и обслуживание
Если ПЧ не работает на полную мощность, то рекомендуем проверить тормозной резистор для преобразователя частоты, в таблице ниже даны оптимальные показатели. В том случае, если данные Вашей детали не совпадают с ними, то необходима замена резистора:

Фото — Данные для тормозных резисторов
Система может дать сбой, если Вы выбрали очень мощный ПЧ для слабой сети. Дело в том, что большинство деталей преобразователя предназначено для постоянного напряженного состояния, если уровень сигнала не доходит до минимальных показателей ПЧ, то он не будет работать.
Есть два варианта:
- Техническое испытание;
- Проверка схемы выпрямления.
Также можно попробовать поискать проблемы своими силами, при помощи мультиметра:
Преобразователь напряжения – частота или ПНЧ (VFC) – устройство для преобразования аналоговых сигналов в импульсные. На базе VFC-преобразователей построены аналого-цифровые преобразователи.
Кодирование аналоговых сигналов обеспечивает устойчивость к помехам, передачу сигнала на приемные устройства без искажений, простоту гальванической развязки. Такие преобразователи используютсядля измерения усредненных технологических параметров, генераторов импульсов различной формы и ширины, а также частотной модуляции.
VFC-преобразователи относятся типу интегрирующих и отличаются:
- Относительно низкой ценой.
- Минимальным нелинейным искажением.
- Высокой помехоустойчивостью.
- Точностью при небольшом количестве высокоточных элементов.
- Невысокой чувствительностью к изменению величины напряжения питания.
При подаче на вход напряжения ПНЧ, оно преобразуется в импульсы, следующие с частотой, прямо пропорциональной величине выходного сигнала.
В ПНЧ на базе микросхемы применяется метод интегрирования выходного напряжения с импульсной компенсацией заряда конденсатора. Для стабилизации и точности преобразования требуется добиться стабильности вольт-секундной характеристики импульсов обратной связи. Для этих целей служат кварцевые резонаторы, которые являются элементами синхронизированных схем VFC-преобразователей.
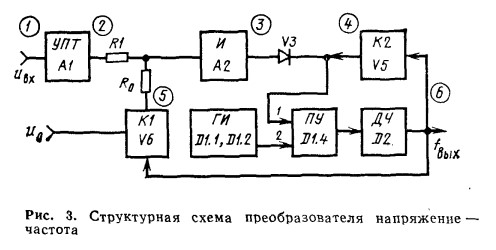
Схема преобразователя выполнена по принципу двойного интегрирования, обеспечивающего высокую точность в широком интервале напряжений.
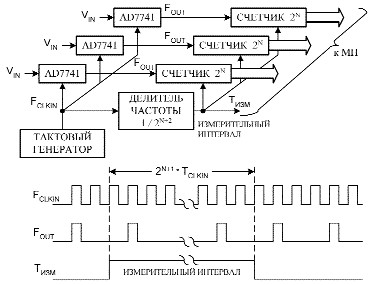
Устройство состоит из усилителя постоянного тока УПТ, ключей управления К1 и К2, интегратора И, делителя частоты ДЧ, генератора импульсов ГИ, порогового устройства ПГ. Преобразование напряжения осуществляется таким образом: входной сигнал инвертируется и усиливается в блоке УПТ. Далее, через резистор R 1 поступает на вход интегратора. Напряжение на выходе блока И возрастает прямо пропорционально уровню входного сигнала, пока не достигает значения срабатывания порогового устройства.
На его выходе формируется сигнал, включающий генератор импульсов, попадающих на делитель частоты. При определенном их количестве, с ДЧ поступает сигнал, отпирающий ключи К1 и К2. Размыкание К1 обеспечивает поступление опорного напряжения. Открытие ключа К2 обеспечивает открытое состояние порогового устройство вне зависимости от уровня входного сигнала. Импульсы с генератора при этом продолжают приходить на делитель частоты. На выход ПНЧ поступают входное и опорное напряжение.
Завершается формирование выходного импульса ПНЧ изменением потенциала на выходе делителя частоты и запиранием ключей К1 и К2. После чего цикл повторяется.
Длительность такта зависит только от частоты импульсов с генератора и коэффициента деления частоты. При увеличении величины напряжения на входе, частота выходных импульсов ПНЧ возрастает.
Более высокую точность преобразования обеспечивает схема на базе кварцевого генератора тактовых импульсов.

Сделать компактный, встраиваемый и недорогой частотный преобразователь с питанием от однофазной сети 230-240 В 50Гц, способный управлять асинхронными 220 В 3-х фазными двигателями 1..2 кВт, для плавного разгона и остановки и поддержания частоты вращения от 0 до 1500 об. в мин. Связь с устройством через полевую шину CAN или RS485.
Решиться делать свой ЧП непросто, потому что есть масса готовых на любой вкус. Своя мелкосерийная разработка по цене будет неконкурентной. Однако если в ЧП перенести часть функциональности конечного агрегата помимо управления мотором, то можно удешевить аппаратную обвязку вокруг ЧП и экономически оправдать его создание.
Поиск интегрированных решений
В сети есть открытые проекты и отладочные платы частотных преобразователей с полной документацией и неплохо документированным софтом. Остаются неясными только вопросы оптимальности архитектуры, альтернативной компонентной базы, безопасности, электромагнитной эмиссии, надежности и прочая мелочь вроде диагностики, зазоров, клем, ремонтопригодности. Словом вопросов остается много.
Мы начали с покупки, казалось бы, солидного решения от фирмы Microchip. Коллеги по соседству тоже делали ЧП на Microchip, и я подумал что это то что нужно. Да, там еще был и корректор мощности.

Эта плата сгорела после первого же подключения реального 1 кВт AC мотора. Изучив трассировку плат, стало понятно, что не сгореть это не могло. Вспыхнула пара дорожек под процессорным модулем. Что-то не рассчитали с их шириной. От решений Microchip сразу отказались и больше не возвращались. Все-таки нишевые микроконтроллерные архитектуры — это не наше. А тут еще такой фейл.
Были еще рассмотрены решения от ST, TI, NXP(Freescale), Infineon. Все хотят привязать разработчика к своим семействам микроконтроллеров. Используют для этого все средства - от лицензионных соглашений, до закрытых библиотек и программных инструментов. Этот мир вдруг показался неуютным.
Изучение других ЧП
Так как наборы разработчика от производителей чипов перестали вызывать доверие, то вторым шагом было посмотреть, как сделаны промышленные ЧП. Интересно узнать какие там микроконтроллеры, сколько их, какие силовые элементы, драйверы и прочее.
HANNING ELEKTRO-WERKE GmbH & Co. KG.

Это изделия, относящиеся к классу встраиваемых. Имеют пассивное охлаждение, т. е. в них отсутствуют вентиляторы. Лишены всяких элементов ручного управления и индикации, поскольку ставятся в труднодоступных местах. Предполагается подключение к неким внешним панелям управления через интерфейс RS485. Теоретически должны быть идеально согласованы с управляемыми ими моторами.
Правда опыт эксплуатации несколько испортил впечатление. Несмотря на наличие усиленных EMI фильтров и специализированных микроконтроллеров несколько таких преобразователей у нас сгорело просто потому, что заклинивало редукторы у моторов. Ниже показаны снимки внутренности одного из ЧП данной серии.

OMRON 3G3MX2-A4040-E.

Это ЧП общего применения c 3-фазным входом. Очень многофункциональный. Настолько, что одних только регулируемых параметров в нем около 700. Мануал 350 страниц. Состоят из четырёх многослойных плат с двухсторонним монтажом. Решение довольно дорогое для мелкосерийной разработки, но все равно интересное с точки зрения применяемых вычислительных ресурсов.


Преобразователь OMRON не имеет корректора мощности, но в случае необходимости дополнительного подавления пульсация тока в разрыв DC шины можно подключить внешний мощный дроссель. Также нет стартового реле с ограничителем тока при подаче напряжения, эту роль скорее всего выполняет твердотельный ключ с резистором 13 Ом. Обмен с сервисной программой несмотря на USB очень медленный. ЭМИ-фильтра на борту нет. Отличаются повышенной перегрузочной способностью, видимо обусловленной оригинальным исполнением IGBT модуля.
Invertek OPTIDRIVE P2

Частотный преобразователь OPTIDRIVE P2 очень технологично скомпонован и послужил образцом для нашего проекта. Выполнен также на двух микроконтроллерах, но до второго добраться не удалось. В качестве силового элемента использована сборка SPM 45 Series от фирмы FAIRCHILD.
Еще изучались преобразователи Lenze SMVector (выполнен на MC9S12E128, 16 bit, 128 KB Flash, 8 KB RAM, 50 MHz и MC68H0908, 8 bit, 32 KB Flash, 512 B RAM, 8 MHz)
Shenzhen INVT Electric Goodrive20-EU
И наконец на самом пике дефицита пришлось изучить преобразователь, разработанный в Китае - Goodrive20-EU. Надо признать, что Goodrive20 явился примером экономии на всем: меньший чем у остальных размер радиатора, меньшая емкость конденсаторов, всего один микроконтроллер, отсутствие ЭМИ-фильтра, лаконичная документация, сравнительно бедный набор регулируемых параметров.

И тем не менее он работал не хуже чем Omron MX2 в некоторых применениях, хотя и с нюансами в способе управления. В частности, долго инициализируется после подачи питания.
Обобщенная структурная схема ЧП
В результате сформировалось представление об обобщенной архитектуре ЧП.
Во-первых, во всех исследованных ЧП применяются интегрированные IGBT модули. На дискретных транзисторах изделий не попадалось. Всегда есть узел ограничителя тока включения. Даже до мощностей в 3 кВт с питанием от однофазной сети не встречаются корректоры мощности (ККМ). Наличие EMI фильтра тоже не является обязательным. Не бывает в ЧП и предохранителей. ЧП всегда включают через защитные автоматы.
Интерфейсная часть ЧП гальванически развязана от силовой части. Силовая часть находится под управлением микроконтроллера с архитектурой DSP или RISC. Микроконтроллеры при этом не самые быстрые по современным меркам, не более 80 МГц. Интерфейсная часть может содержать, а может и не содержать отдельного микроконтроллера. Измерители токов фаз на двигателе делаются на основе шунтов, присоединённых к минусу DC шины. Важным компонентом промышленных ЧП является сдублированный узел экстренного гарантированного отключения мотора (safe torque off, STO). Это узел позволяет отказаться от пары внешних контакторов для отключения питания ЧП в экстренных случаях.

Обобщенная архитектура ЧП
В результате анализа было решено для своего ЧП использовать один микроконтроллер, но более производительный. Им стал MK60FN1M0VLQ12 (ARM® Cortex®-M4, 120 МГц, 1 MB Flash, 128 KB RAM). В пользу такого выбора было несколько аргументов. На тот момент фирма Freescale выложила хороший программный инструментарий для разработки ПО управления двигателями и его отладки. И был расчёт на применение вычислений с плавающей точкой вместо вычислений с фиксированной. Это облегчило бы отладку, моделирование и тестирование. Про остальные аргументы было в этой статье.
Конструкция ЧП
Поскольку ЧП встраиваемый, то он не нуждается в специальном корпусе. Поэтому был изготовлен простой кожух из листовой стали с креплением двух вентиляторов. Была цель максимально упростить сборку и разборку ЧП. Пилотная версия нашего ЧП в свое время размещалась на одной плате. В этой версии стало три платы. Таким образом ЧП получился более компактным. А его модульность позволяет удешевить модификации функциональности и проще выполнять изменения в компонентной базе.
ЧП состоит из трех основных плат:
Управляющая плата с микроконтроллером и внешними интерфейсами.
Плата DC шины, на которой расположен блок питания и блок конденсаторов
Силовая плата, на которой расположен IGBT модуль, силовые входы и выходы, измерители тока, EMI фильтр.
Компоненты ЧП
Управляющая плата
На управляющей плате находится микроконтроллер и гальвано изолированные внешние интерфейсы:
интерфейс для подключения внешнего квадратурного энкодера
три дискретных выхода и один дискретный вход
Управляющая плата соединяется с силовой платой двумя плоскими шлейфами через разъемы X7 и X8. Через X7 проходят сигналы управления затворами IGBT модуля. Через X8 проходят сигналы измерения тока и напряжения, линии I2C и несколько других сигналов. Похожая схема применяется в Goodrive20-EU.
Кроме того, на управляющей плате находится литиевый аккумулятор для поддержания энергонезависимой работы часов реального времени, держатель для uSD карты и зуммер. Это не обязательные компоненты, но полезные на этапе разработки, отладки и диагностики ПО.
Плата DC шины
DC шина находится под напряжением 310. 340 В и через нее проходит средний ток до 10А на максимальной мощности. На плате размещен блок питания в виде отдельного модуля. Так решено было сделать питание просто ради упрощения дизайна платы. На плате находится транзисторный ключ Q3 управляющий вентиляторами. Вентиляторы включаются только при достижении IGBT модулем определенной заданной температуры.

Плата DC шины и питания
Силовая плата
Главным элементом всего устройства является IGBT модуль.

IGBT модуль
В нашем случае использован модуль FSBB30CH60C. Модуль порадовал своей исключительной надежностью. В течении разработки не сгорел ни один модуль. Некоторое время назад это был самый доступный и недорогой модуль. Модуль управляется напрямую логическими сигналами и имеет встроенные защиты от недонапряжения и короткого замыкания.

Плата термосенсора
Немного усложняет дело отсутствие температурного сенсора, встроенного в модуль. Термосенсор пришлось сделать отдельно на микросхеме MAX31725MTA+ на своей маленькой плате и разместить под корпусом IGBT модуля. Проект термосенсора находится в директории TempSensor. Термосенсор соединен с микроконтроллером интерфейсом I2C.
Измерение токов на трех выходах IGBT модуля сделано иначе чем в обычных ЧП. Вместо шунтов поставлены гальвано изолированные датчики Холла ACS759LCB-050B-PFF-T. Это более дорогое решение, но позволяющее более креативно подойти к выбору способов модуляции и упростить трассировку. Традиционные шунты в нижних плечах силовых транзисторов ограничивают возможные типы модуляций. Это не проблема в промышленных ЧП, но наш сделан еще и в экспериментальных целях и мог бы быть применен не только с асинхронными двигателями, но и с синхронными, и с более экзотическими.

Схема силовой платы Силовая плата с IGBT модулем, выпрямителем, ЭМИ фильтром и проч .
Программное обеспечение
Фирмаваре ЧП состоит из двух частей: начального загрузчика и основного приложения.
Начальный загрузчик находится в директории Firmware/Inverter_bootloader и позволяет загружать основное приложение через CAN и через интерфейс RS232. Бинарный образ приложения создается утилитой BIB. Утилита находится в директории Firmware/Loader.
Помимо прочего образ может быть утилитой зашифрован. Загрузчик умеет расшифровывать образы.
Сам проект рабочего приложения находится в директории Firmware/Inverter_firmware. Компилируются проекты в среде EWARM, версии не выше 670.3
Представленное программное обеспечение расчитано на очень простое подключение ЧП.

Схема подключения ЧП
ЧП управляется по шине CAN в режиме скалярного управления.
Почему скалярного? Скалярное управление несмотря на все недостатки при этом характеризуется более низким уровнем шума издаваемым мотором, по крайней мере, когда имеем дело с ЧП, описанными выше и безсенсорным управлением. При стабильной нагрузке и номинальной скорости двигателя в основном рабочем цикле скалярное управление хорошо себя показывает.
Принято считать ("Practical Variable Speed Drives and Power Electronics", Malcolm Barnes 2003 ) что безсенсорное скалярное управление обеспечивает точность скорости в 1% и время отклика момента 100 мс, а векторное безсенсорное соответственно 0.5% и 10 мс.
Результаты качества потребления энергии частотным преобразователем на разных мощностях при частоте модуляции 16 КГц:

Используемы в таблице обозначения:
V(V) – текущее действующее входное напряжение однофазной сети в вольтах
THD V(%) – total harmonic distortion, Коэффициент нелинейных искажений по напряжению
I(A) – действующее значение тока в амперах
THD I(%) – total harmonic distortion, Коэффициент нелинейных искажений по току
I peak (A) – пиковое значение тока в амперах
CF I (A) – Коэффициент амплитуды сигнала (крест-фактор) в амперах
|P| (W) – Активная потребляемая мощность в ваттах
Q (Var) – Реактивная потребляемая мощность. Единица измерения – вар
S (VA) – Полная потребляемая мощность. Единица измерения ВА
PF - Коэффициент мощности
COS PHI – косинус фи
Несколько слов о безопасности
Сначала о сохранности самого преобразователя. Всегда надо помнить о такой вещи как реформинг. Может случиться так что высоковольтные электролитические конденсаторы, установленные в ЧП где-то долго хранились, или сам ЧП не был подключен в сеть более года. В таком случае у конденсаторов истончается диэлектрический слой, и они могут не выдержать быстрой подачи на них полного номинального напряжения и рабочего тока. Тогда требуется реформинг или, иными словами, осторожное постепенное включение.
Защита от возгорания. Она организуется несколькими способами. Сами печатные платы должны быть изготовлены по соответствующей технологии и иметь UL маркировку. Далее необходимо обеспечить ширину силовых проводников на плате, исключающую их возгорание раньше, чем произойдёт выключение внешних силовых расцепителей.
Так выглядит полная эталонная схема обвеса частотного преобразователя не снабженного KKM (без отображения цепей безопасности)
Электробезопасность. Корпус ЧП обязательно должен заземляться. Варисторы на входе ЧП обеспечивают защиту от кратковременных перенапряжений, но при длительных перенапряжениях они сгорают, оставляя толстый слой проводящей сажи.
Тут в действие вступает заземление. Однако ставить чувствительные реле утечки на частотные преобразователи не рекомендуется, поскольку емкость мотора относительно земли настолько существенна, что может вызвать утечку большую чем уровень срабатывания реле. Поэтому заземление должно быть максимально надежным. Стоит также помнить, что заземление само по себе не обеспечивает защиту от электромагнитных помех, излучаемых самой цепью заземления. Поэтому все информационные кабели если они лежат рядом с цепью заземления или заземляющими конструкциями должны иметь свои экраны подключённые к собственным локальным землям. И такие экраны не должны образовывать замкнутых контуров.

Так выглядит лучшая организаци подключения
Эксплуатационная безопасность. На роботизированных объекта, станках, агрегатах, подъемниках, кранах, эскалаторах - везде есть средства экстренной остановки в виде концевиков, датчиков, микровыключателей и проч. Чтобы люди сами могли активизировать экстренную остановку устанавливаются большие заметные красные кнопки. Все эти средства объединяются в электрическую цепь безопасности. Конечной точкой этой цепи являются контакторы, реле или иные ресцепители, обрывающие подачу тока на электродвигатели. На частотных преобразователях в роли расцепителя выступает узел STO (safe torque off) упомянутый выше. Обычно есть два дублирующихся входа STO, но в нашем ЧП есть только один. Это означает что для реализации дублирования средства безопасности дополнительно необходим внешний контактор, разрывающий цепь питания к ЧП при разрыве цепи безопасности. Так требуют стандарты.

В результате у нас получился вот такой ЧП

Для тех же кто заинтересовался проектом в директории JTAG_isolator лежит проект платы изолятора JTAG интерфейса. Очень трудно отлаживать электронику подключенную в сеть без хороших изоляторов.
К сожалению, формат короткой статьи для хабра не позволяет описать все перипетии разработки, алгоритмы, архитектуру софта и прочие подробности. Поэтому заранее прошу понимания читателей если тема не раскрыта в желаемом объёме.
Ещё есть время.
Читайте также:
- Как договориться с банком о мировом соглашении по автокредиту
- Mazda update toolbox не запускается
- На сеат кордоба не хватает мощности аккумулятора на стартер что делать
- Что вреднее дым от сигареты дым от газовой горелки выхлопные газы
- Зеркало видео регистраторы с функцией антирадар и навигатор в одном цена