
Как отличаются углы поворота управляемых колес и какой путь они проходят при повороте автомобиля
Обновлено: 06.07.2024
Notice: Undefined variable: page в функции danland_preprocess_page() (строка 106 в файле /home/admin/web/auto.fm/public_html/sites/all/themes/danland/template.php).

Если руль вывернуть до упора, а затем выйти и посмотреть на машину спереди, то сразу заметно – одно колесо вывернуто сильнее, чем второе. Это не является неисправностью автомобиля, а наоборот, точно выверенный инженерный расчет. Так с какой же целью рулевое управление спроектировано именно таким образом?
Для чего колеса машины поворачиваются под разным углом?
Ответ прост. Представьте ситуацию – машина едет по кругу слева направо (по часовой стрелке), то ее правое переднее колесо будет двигаться по окружности, которая меньше за ту, которую будет описывать левое. Таким образом, при постоянной скорости машины колеса, которые находятся на одной оси будут крутиться с разной скоростью. В случае, когда бы колеса были повернуты под одним углом, то колесо, расположенное внутри, при стремлении двигаться, как и наружное, всегда проскальзывало бы и причиняло проскальзывание внешнего – в повороте управляемость машиной была бы непредсказуемой, а изнашивание шин – просто катастрофическим. Воочию это можно наблюдать на многоосных тележках прицепов и грузовиков: в повороте колеса движутся не поворачиваясь, с проскальзыванием, и в результате – неравномерный быстрый износ шин. Чтобы разрешить эти проблемы и обеспечить правильное вращение управляемых колес, они и вращаются под разными углами.

Каков расчет геометрии движения колес?
Чтобы гарантировать нужные углы вращения колес, геометрия рулевой трапеции вычисляется по одинаковой схеме. Согласно которой поперечная тяга руля короче оси управления и за нее смещена, а поворотные рычаги руля расположены на линии, которая находится между поворотной осью передних колес и центром задней оси машины.

В автоспорте такой подход может не совпадать: на некоторых гоночных машинах, например, ситуация с поворачиванием колес может даже быть противоположной для компенсирования в скоростных поворотах бокового увода колеса, а в дрифте колеса, находящиеся спереди, даже в поворотах пытаются сделать параллельными. Это необходимо для снижения износа передних автопокрышек, при их постоянном вращении в управляемом заносе. Такое решение – крайность и для обычных серийных авто не актуально.

Вы иногда обращали внимание под каким углом поворачивают передние и задние колеса? Автомобилисты, которые хоть раз этим вопросом интересовались, заметили, что они поворачивают под разным углом. С первого взгляда можно подумать, что это неправильно и пора посетить станцию технического обслуживания. Не спешите – это всего лишь техническое решение, которое также представлено в спорткарах. Пришло время раскрыть перед Вами этот мировой заговор и тайну глобального масштаба.

Почему колеса поворачиваются под разными углами?
Ответ на самом деле очевиден. Достаточно представить только ситуацию, когда транспортное средство передвигается по направлению часовой стрелки по кругу. В такой ситуации окружность движения правого колеса намного меньше, чем получается левая окружность. Потому если машина едет с одной и той же скоростью, колеса транспортного средства на идентичной оси вращаются с различным скоростным режимом.
Теперь вернемся к тому, что они поворачиваются под одинаковым углом. Это будет провоцировать стремление внутреннего колеса двигаться по аналогии с наружным, но оно будет проскальзывать. Идентично будет вести себя и наружное. Такое движение транспортного средства во время маневров будет непредсказуемым, провоцирующим глобальный износ резины. Для наглядного примера советую обратить внимание на многоосные тележки прицепов и грузовых машин: шина изнашивается неравномерно и очень быстро.
Особенности просчета геометрии колес
Описанная выше проблема появилась задолго до того времени, как в широком обиходе появились автомобили. К сожалению, идентичная ситуации встречалась также у повозок, в которые запрягались лошади. Именно для таких повозок и было разработано первое рулевое управление, решающее такую неприятность.
В далеком 1817 году Георг Ланкеншпергер изобрел решение проблемы, а спустя 12 месяцев в Великобритании оно было запатентовано Рудольфом Аккерманом, помощником изобретателя. С того периода этот принцип носит названия Аккермана. Для обеспечения правильных поворотов колесной базы, геометрия рулевой трапеции рассчитывается по одной единственной схеме.

Согласно с особенностями такого принципа, поперечная рулевая тяга всегда меньше по длине, чем ось управления, и смещается за ней. При этом между центром задней оси транспортного средства и осью поворота передних колес находятся рулевые рычаги, которые отвечают за поворот. Именно потому во время поворота колеса будут демонстрировать разные углы: наружное под меньшим, а внутреннее – под большим углом. Эти параметры не влияют на центр окружности, он остается без изменений. Предлагаю Вам обратить внимание на схематическое изображение процесса. Возможно, таким образом принцип будет более понятным.

Принцип геометрии движения идентичен для всех автомобилей, которые используются в частном и промышленном порядке. Но для гоночных транспортных средств этот подход может слегка меняться. Это зависит от конечного результата, необходимого для достижения, к примеру, дрифт, быстрая скорость, правильное вхождение в поворот на большой скорости с непростым дорожным покрытием. Но такие параметры совсем не играют роли для автомобилистов, которые управляют машинами на городских дорогах или загородных трассах.
При повороте автомобиля векторы скоростей центров всех колёс перпендикулярны радиусам, проведённым из центра поворота (рис. 36). У автомобиля, имеющего жёсткие в поперечном направлении шины, векторы скоростей совпадают со средними плоскостями колёс, и центр поворота О находится на продолжении оси заднего моста.
Управляемое колесо, внутреннее по отношению к центру поворота, должно быть повёрнуто на больший угол, чем внешнее. Чтобы обеспечить требуемое соотношение между углами поворота управляемых колёс, их соединяют рулевой трапецией.
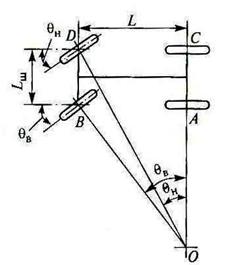
Рис. 36. соотношение углов поворота управляемых колёс:
L – база автомобиля; LШ – расстояние между центрами шкворней;

На самом деле в этом нет ничего страшного, это хорошо продуманное техническое решение. Когда осуществляют поворот в ту или иную сторону, то внутреннее колесо движется немного медленнее наружнего (ближе к центру проходит путь меньше). Если бы оно двигалось с равнозначной скоростью, то периодически скользило, другое соответственно тоже. В таком случае поведение автомобиля непредсказуемо. Наглядно это можно рассмотреть на прицепах, где заметили ещё один факт - шины быстро изнашиваются.
Специально для безопасности дорожного движения была создана коллегия инженеров. Ими была рассчитана геометрия рулевой трапеции. Сделано это было в начале 20 века, еще на гужевой повозке. Предпосылками были часто ломающиеся деревянные колеса.
В автомобильном спорте углы при повороте колес могут меняться в обратную сторону, это сделано специально. При входе в поворот на большой скорости, комментируется боковой увод колес.
Читайте также: