
Из чего сделаны колеса марсохода
Обновлено: 05.07.2024
И какие аппараты в будущем будут двигаться по поверхности планет и их спутников.
За десятилетия космической гонки учёные создали разные варианты аппаратов для исследования других планет. Самыми эффективными оказались разработки на основе колеса, а в будущем появятся устройства, способные летать в условиях разреженной атмосферы и нырять в подлёдный океан. Инженер космической отрасли и автор научно-популярного блога Science & Future в Яндекс.Дзене Денис Юшин объясняет, зачем нужны планетоходы и что их отличает от земных машин.
Зачем нужны планетоходы
Планетоход — это транспортное средство, предназначенное для передвижения по поверхности других планет, спутников или астероидов. Такие аппараты должны выдерживать перегрузки, существенные перепады температур и воздействие космической радиации, сохраняя работоспособность на протяжении всего срока эксплуатации. Кроме того, ограниченный объем пространства под обтекателем ракеты-носителя накладывает дополнительные ограничения на аппараты — они должны быть максимально компактными.
Планетоходы позволяют исследователям получать важнейшие научные сведения. Так, аппараты Spirit и Opportunity подтвердили существование в прошлом на Марсе жидкой воды. Один из приборов новой американской миссии Perseverance попробует производить кислород из марсианской атмосферы — это поможет понять, пригодна ли Красная планета к колонизации.
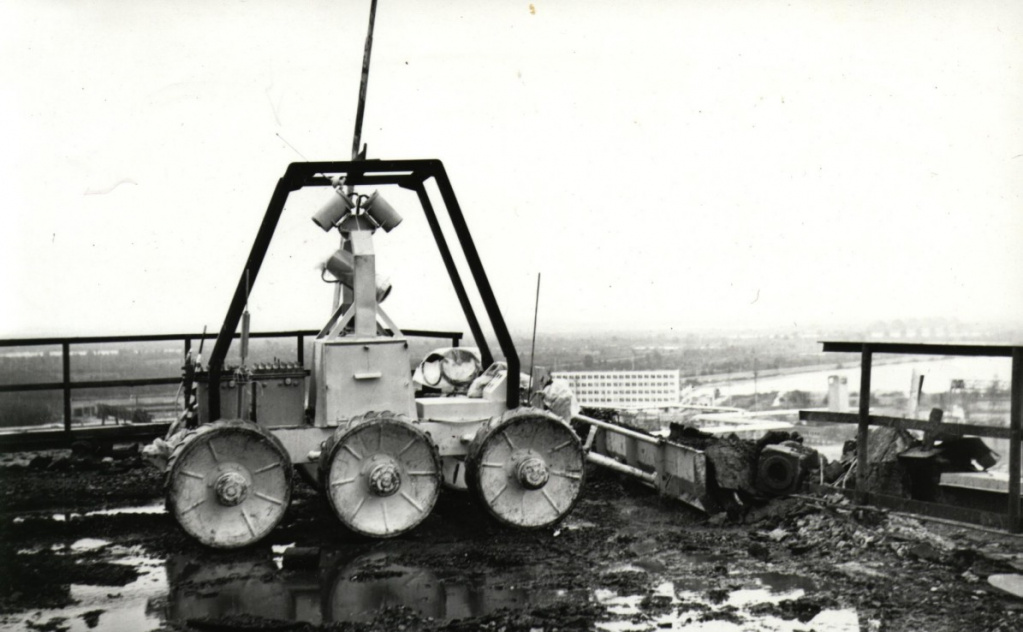
Робот СТР-1 использовался для уборки радиоактивных обломков с крыши Чернобыльской АЭС. Фото: Science & Technology Rover Co. (ВНИИТМ).
Марсианские лыжи
Инженеры под руководством Кемурджиана выбрали такой нетривиальный способ передвижения, поскольку точных сведений о поверхности Марса ещё не было, а лыжи позволяли увеличить площади опоры. К сожалению, сигнал со станции пропал через 14,5 секунд после мягкой посадки, поэтому лыжня на Красной планете так и не появилась.
Марс вообще мог бы стать прекрасным полем для экспериментов. Когда-то инженеры рассматривали возможность отправлять туда аппараты на гусеничном шасси — от этой идеи отказались, потому что существовал высокий риск повреждений гусениц, которые привели бы к прекращению миссии.
Постепенно учёные поняли, что почти все объекты Солнечной системы, доступные сейчас для исследования, обладают твёрдой поверхностью с обширными равнинными участками. Ни растительности, ни болот — только твёрдый грунт.
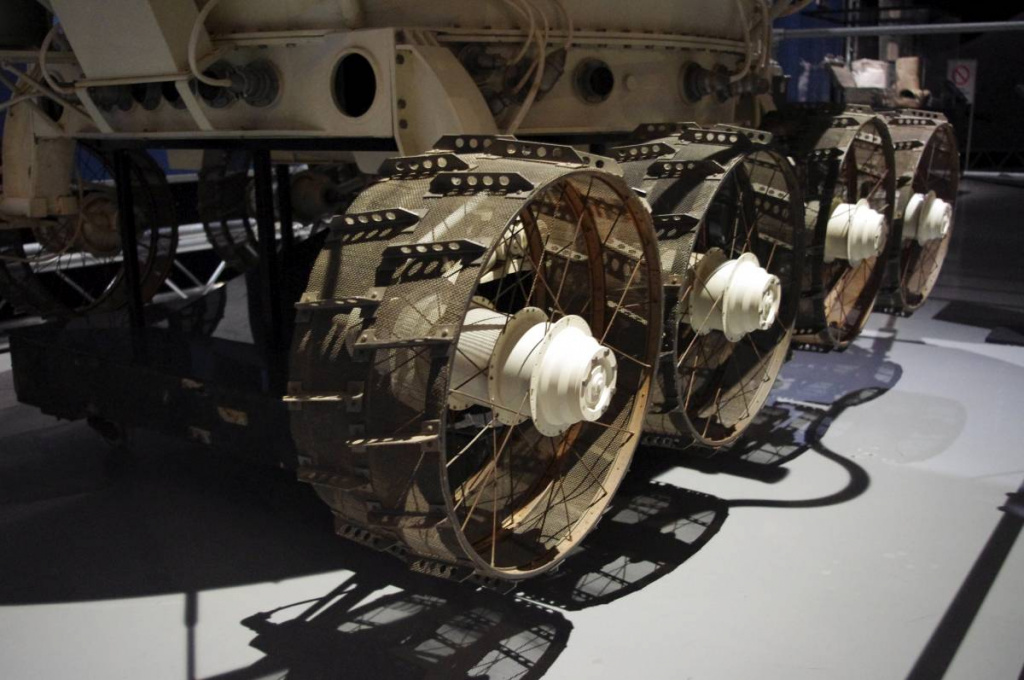
Грунтозацепы и сетка на колёсах модели советского лунохода. Фото: liftarn/Wikimedia Commons.
Сегодня чаще всего планетоходы оборудуют мотор-колёсами — специальными агрегатами, которые содержат все необходимые датчики, электромотор, редуктор и тормоз. Обычно таких сложных колёс шесть — это позволяет снизить нагрузку на грунт и продолжить миссию после поломок одного из движителей.
Со временем стало понятно, что сетка плохо подходит для планет с относительно большой гравитацией (например, Марса), так как она быстро разрушается. В итоге просторы Красной планеты бороздят машины на колесах со сплошной поверхностью и грунтозацепами.
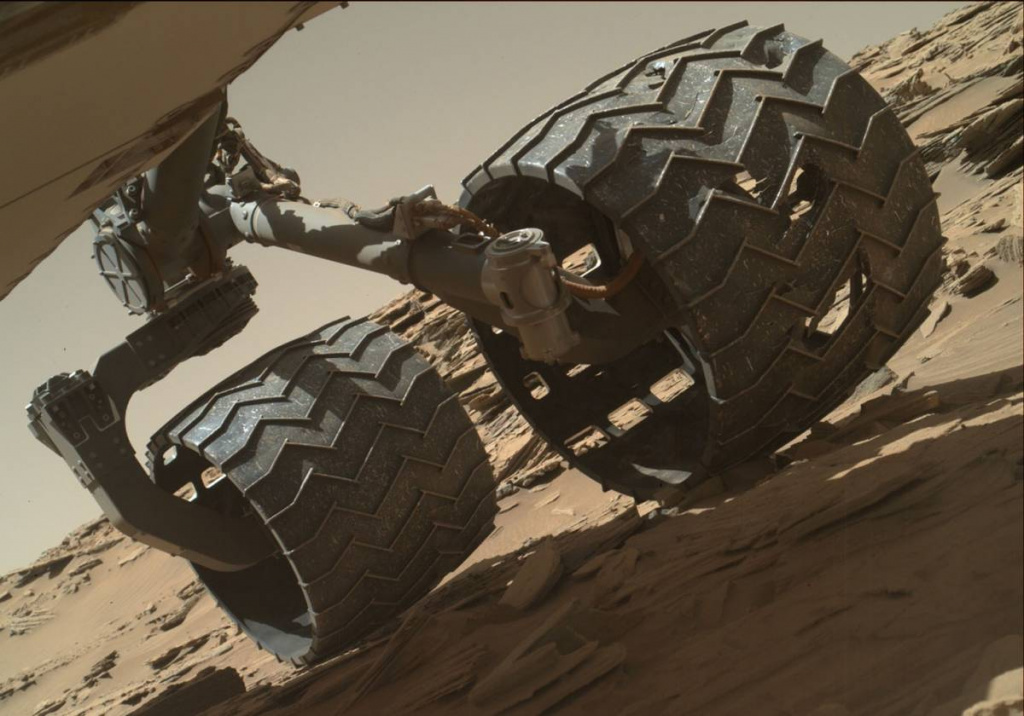
Колёса марсохода Curiosity, снятые собственной камерой MAHLI в 2016 году. На одном из колёс заметны характерные повреждения от марсианских камней. Фото: NASA/JPL-Caltech/MSSS.
Планетоходы будущего
Прямо сейчас к Марсу летят сразу два новых планетохода — американский и китайский. Их шасси практически не отличается от знаменитого марсохода Curiosity — шесть мотор-колёс с независимой подвеской. Эти аппараты будут анализировать химический и минералогический составы марсианского грунта, а также искать органические соединения и пытаться найти следы жизни, если она когда-либо там была.
Интересно, что с американской миссии начнётся изучение нового способа перемещения на других планетах — по воздуху. В её состав включён прототип первого марсианского вертолёта. Сложностей там не меньше, чем при езде по поверхности. Плотность атмосферы на Красной планете составляет лишь около одного процента от земной. Этот недостаток частично компенсируется тем, что гравитация на Марсе в три раза меньше, чем на Земле. Скоро мы узнаем, может ли в принципе функционировать марсианский вертолёт.
Есть в Солнечной системе объекты, для изучения которых придется нырять в жидкую среду. В NASA уже испытали прототип аппарата для изучения подлёдного океана спутника Юпитера Европы — устройство получило название Buoyant Rover. А аппарат EurEx (Europa Explorer), который разрабатывают в Германии, будет способен погружаться на глубину около 100 километров.
Это общая статья. В ней я расскажу и покажу из чего состоит мой марсоход. Прежде всего, корпус и шасси.

Тот самый марсоход
Также большое впечатление на меня оказала панорама Марса, снятая этим марсоходом.
Мой марсоход выглядит немного скромнее.

За основу ходовой части я конечно же брал шестиколесную подвеску со сдвоенной парой колес. Крутость такой подвески можно оценить на этом видео. Ходовая часть состоит из следующий компонентов:
Моторы
6 шт. 9 вольт (150 оборотов в минуту) с редукторами и датчиками оборотов. Скорость они развивают приличную, но я бы не сказал, что с моим диаметром колес они тянут хорошо. Для марсохода куда важнее проходимость, чем скорость. Брал тут за $9 за штуку.

Брал я их в сборе, с крепежным уголком и латунным переходником под колеса. Переходники я нигде кроме Aliexpress не видел. Вал и колеса очень сложно соединить каким-то иным способом. Продавец прислал 4 мотора без переходников, пришлось сделать временно решение на 3D принтере.

Аналог латунного переходника из PLA для крепления колеса
Позже продавец дослал недостающие детали. Но они оказались длиннее в 2 раза. Эту проблему я отложил, она не критична.
До этих моторов у меня был вариант без редуктора и мини моторы с маленькими редукторами. Но они себя не оправдали.

Колеса
С колесами все просто. Брал с резиновой покрышкой в масштабе 1:10 вот тут за $13 (4 штуки). В целом колеса можно было брать и побольше. Но в идеале нужны такие, которые будут скрывать мотор внутри себя, как у настоящего марсохода. А то сейчас эти длинные моторы цепляются за неровности.

Шасси

Шасси на основе трубок с квадратным сечением 10mm x 10mm x 1mm.
Изначально рассчитывал сделать соединительные узлы из пластика. Даже купил 3D принтер. Спроектировал все в tinkercad. Но распечатанные узлы оказались ненадежными. Я печатал на PLA и ABS. Первый материал был слишком хрупкий, ломался от более-менее ощутимого удара, второй слоился.
3D модель марсохода в tinkercad
Алюминий сверлил шуруповертом и соединял все винтами М3. Еще один вечер и я сделал вторую часть шасси.
Колеса не поворачиваются по сторонам. Повороты будут выполняться за счет разности кручения колес левой и правой сторон, как у танка. Это самый просто вариант.
Основа корпуса из алюминия, а стенки из оргстекла. Этот материал довольно хорошо поддается обработке. Корпус имеет размеры 200mm x 400mm x 100mm.



Днище корпуса марсохода и блок управления на основе PCA9685 и L298n x 3
На последнем фото видно, что моторы управляются драйверами L298N. А эти драйверы в свою очередь управляются платой PCA9685. Это удобно, если контролируешь все это через Raspberry pi 3. Так как на этом микрокомпьютере мало возможностей для генерации аппаратного PWM сигнала. А вот плата расширения, подключенная через I2C решает все проблемы. К слову, чтобы управлять каждым мотором по отдельности нужно 18 каналов. каждый мотор требует 1 канал PWM и два канала направления. Похимичив, можно сделать 1 канал направления, но такой потребности пока нет.
Башня

Башня с поворотным механизмом по двум осям
Для башни была куплена коробка для поделок с таким расчетом, чтобы в нее поместилась камера. Камера поворачивается по двум осям. Повороты осуществляются с помощью двух сервоприводов Emax ES08MA. Не могу сказать, что это лучшие сервоприводы для этой задачи (слабые, гудят при больших нагрузках). Есть MG996R, но для такой конструкции они великоваты. Раньше я пробовал использовать поворотный механизм для камеры, но он трясся при поворотах, Больше самой камеры ему не доверишь.
Таким образом, мой марсоход находится на стадии, когда нужно все прикрутить и начать испытания ходовой части. Управляется он через браузер. С помощью клавиатуры и мыши. Сервере управления написан на nodejs. Некоторые модули будут работать на python и С++.

В других статьях я более детально расскажу о том, как я рассчитывал ток потребления для ходовой части и собирал батарею из 16 банок 18650 на основе одной BMS платы 4s.
7 августа 2012 года автономная химическая лаборатория Mars Science Laboratory, более известная как марсоход Curiosity, совершила успешную посадку на поверхность Марса и передала на Землю первые снимки. Это знаменательное событие породило много публикаций в прессе и обсуждений в блогах и форумах. Одно из таких обсуждений, имевшее место на форуме Reddit, отличается от других тем, что специально для него были приглашены участники миссии Curiosity, ответившие на многие каверзные вопросы. Использовав эти ответы и некоторые другие материалы, мы выбрали десять наиболее занятных фактов о марсоходе Curiosity и его команде.
Автопортрет Curiosity, склеенный из множества снимков с частями марсохода
1. Четыреста человек живут на Марсе
За одним неспешно передвигающимся по поверхности Марса аппаратом стоит команда из 250 учёных и примерно 160 инженеров, обеспечивающих круглосуточное наблюдение за ходом миссии. Все они живут по марсианскому времени. Марсианские сутки длиннее земных на 40 минут, из-за чего землянам приходится каждый день переставлять будильники (или устанавливать специальные приложения для iPhone и Android).
Сол 2: Beatles — Good Morning Good Morning с альбома Sgt. Peppers Lonely Hearts Club
Сол 6: Anthrax — Got the Time и 30 Seconds to Mars — Echelon
Сол 7: The Doors — Break on Through и Джордж Харрисон — Got My Mind Set on You
Сол 9: Саймон и Гарфанкел — Wake Up Little Susie
Сол 10: Фрэнк Синатра — Come Fly with me
При желании несложно рассчитать начало светового дня в той точке, где расположен Curiosity, выбрать нужный трек и слушать музыку одновременно с командой марсохода.
2. У Curiosity есть лазер и взрывчатка
В ближнем бою Curiosity также может использовать бур, зарывающийся в грунт на глубину до пяти сантиметров.
На борту Curiosity есть и некоторое количество взрывчатки, однако она предназначена не для того, чтобы делать новые кратеры. Взрывчатое вещество используется в так называемых пироболтах — механических соединениях, требующих автоматической отстыковки. Такие устройства использовались и в других космических аппаратах, включая марсоходы Spirit и Opportunity, и технология считается хорошо отработанной. Тем не менее пиротехника требует кропотливого тестирования: никто не хочет, чтобы один из снарядов сработал в неподходящий момент.
3. Curiosity питает ядерный генератор — никаких солнечных батарей
В отличие от других марсианских аппаратов, Curiosity не снабжён ни одной солнечной батареей — всю энергию он черпает из радиоизотопного термоэлектрического генератора (вот документ с подробностями его устройства). По сравнению с батареями такой источник питания удобнее и предсказуемее: песчаная буря, мешающая проникновению солнечного света, не станет преградой.
Выходная мощность генератора — около ста ватт, и для работы особенно мощных модулей (к примеру, бура или лазера) этого недостаточно. Большинство действий Curiosity делает во время марсианского дня, тогда как ночью аппарат может заряжать от генератора аккумуляторные батареи.
4. Curiosity будет искать жизнь на Марсе, но не зародит её
Но что если внеземная жизнь таки будет найдена? В NASA утверждают, что об этом обязательно расскажут общественности, но не раньше, чем факт будет подтверждён основательной проверкой. Против ложных сенсаций тоже есть строгий протокол — как и против земных бактерий.
5. Sky Crane — посадочная система будущего
Празднование удачной посадки Curiosity было по большей части связано с тем, что она стала успешным тестированием посадочного механизма нового типа. Вместо того, чтобы смягчать падение аппарата воздушной подушкой (как было со Spirit и Opportunity), в NASA решили сделать платформу, парящую над поверхностью планеты сперва на парашюте, а затем на ракетных двигателях и спускающую марсоход на тросе. Когда Curiosity достиг марсианского грунта, он отсоединил трос, и платформа Sky Crane отлетела в сторону, упав в шестистах метрах от места посадки.
Те, кто играл в Starcraft, подмечают: сцена явно выглядит знакомой
На тот момент, когда ракета с Curiosity взлетала с Земли, учёные ещё не утвердили место, куда должен был сесть марсоход. Благодаря Sky Crane у них появилась возможность менять решение в любую минуту: в момент крушения платформы на борту ещё оставалось около ста килограммов горючего, которое при других обстоятельствах могло пригодиться при посадке в другую точку.
Будет ли Curiosity проезжать место падения Sky Crane? Увы, нет, но лишь потому, что в качестве целей выбраны другие интересные объекты.
6. Софт Curiosity написан на Си
Центральный процессор компьютера Curiosity вряд ли способен кого-нибудь удивить своей мощностью — от современных технологий он отстаёт лет на восемь. Но для компьютеров-космонавтов это типично: вместо того, чтобы гнаться за мощностью, в космических агентствах выбирают стабильность и проверенность временем. К тому же процессор должен работать в условиях повышенной радиации, и это отражено в его устройстве. Вот его спецификации (из статьи Андрея Василькова об устройстве Curiosity).
Мозгом бортового компьютера служит тридцатидвухразрядный RISC-процессор RAD750. Это защищённый аналог IBM PowerPC 750, разработанный ещё в 2001 году и успешно применяемый в космической отрасли с 2005 года.
В каждом RCE есть базовый модуль EEPROM объёмом 256 КБ, по 256 МБ оперативной памяти стандарта DRAM с коррекцией ошибок и по 2 ГБ флэш-памяти. Подсистема памяти содержит защищённый буфер на случай аварийного отключения питания. По сравнению с предыдущими аппаратами серии Mars Exploration Rovers объём памяти Curiosity увеличен примерно в восемь раз.
На компьютере Curiosity установлена операционная система реального времени VxWorks. Она же использовалась в других марсианских аппаратах: Spirit, Opportunity, Phoenix, Pathfinder и спутнике Mars Reconnaissance Orbiter, а также во многих земных роботах и встроенных системах.
Все программы Curiosity написаны на Си: с одной стороны, этот язык достаточно ёмкий по сравнению с ассемблером, с другой — отсутствие объектно-ориентированных конструкций C++ страхует от лишних ошибок. Программистов Curiosity специально попросили воздерживаться от всех сложностей: запрещены, к примеру, рекурсивные вызовы функций. В остальном программирование марсохода ничем не отличается от любого другого программирования.
Для прямой связи с Землёй марсоход может использовать собственную антенну с сантиметровым диапазоном волн. Если навести её прямо, то можно получить скорость до 10 Кбит/с. Но большие объёмы данных куда выгоднее передавать через спутники Mars Reconnaissance Orbiter и 2001 Mars Odyssey. В этом случае скорость можно повысить до 2 Мбит/с, но лишь в определённых условиях. Марсианские спутники находятся в зоне видимости лишь восемь минут в сутки, но этого достаточно для передачи около 250 Мбит. В среднем задержка при передаче информации к марсоходу и обратно составляет 14 минут, что делает прямое управление затруднительным.
7. Команда Curiosity предпочитает Mac
8. Curiosity сфотографирует небо и Землю
Главная камера Curiosity называется Mastcam и имеет максимальное число диафрагмы f/8 и фокусное расстояние 34 мм, эквивалентное 115 мм для 35-миллиметровой фотоплёнки (подробнее о камере — в статье dpReview). Как и процессор аппарата, сенсор камеры кажется устаревшим по нынешним меркам: его разрешение — всего два мегапикселя. Системы Curiosity проектировались ещё в 2004 году, когда марсоход был на начальных этапах разработки, и тогда двухмегапиксельная камера считалась неплохой. Что поделать: аппарат с десятилетнем циклом разработки просто не способен поспеть за прогрессом. Однако низкое разрешение матрицы — это не такая уж и проблема. В отличие от людей-фотографов, марсоход — сам себе штатив и может сделать несколько идентичных снимков с разной выдержкой и за счёт этого улучшить качество картинки.

В 2010 году кинорежиссёр Джеймс Кэмерон, приглашённый в команду Curiosity, пытался продвинуть идею о том, чтобы заменить камеру на более современную — с трансфокатором и возможностью снимать стереоизображение. Пламенная речь Кэмерона о том, как было бы здорово посмотреть на Марс будто своими глазами, быть может, и тронула руководство NASA, но не настолько, чтобы согласиться на авантюру в последний момент — времени до запуска было слишком мало, чтобы что-то переделывать.
9. Curiosity пишет послания колёсами
10. Марсоходы можно будет возвращать на Землю (но пока что — нет)
Миссия Curiosity распланирована на 23 месяца, после чего будет считаться успешной. Но, как и у прошлых марсоходов, у Curiosity есть шанс проработать дольше — Opportunity, к примеру, бороздит марсианские просторы уже восемь лет. Срок службы генератора, питающего Curiosity, — 14 лет. Но что будет с марсоходом дальше?
В NASA уже подумывают о том, что следующие аппараты могли бы не только изучать полученные образцы грунта на месте, но и отправлять их космической бандеролью на Землю. Это, впрочем, только проекты и планы на отдалённое будущее.
Пролог
Начнем, пожалуй, с определений. Сегодня мы смотрим на марсоходы — устройства, посланные на другую планету с целью спуска и дальнейшего перемещения по поверхности планеты для подробного изучения. Помимо подобных устройств на поверхность Марса также спускались так называемые АМС, автоматические межпланетные станции. Их отличие от марсоходов заключается в том, что они лишены возможности передвижения и собирают информацию, которая доступна исключительно в точке посадки.

Но давайте говорить про марсоходы, потому что АМС, как мне кажется, не настолько интересны. Всего к Марсу было запущено 6 марсоходов, из которых только 4 успешно работали хотя бы какое-то время. Посмотрим на них в хронологическом порядке.
ПрОП-М

Размеры ПрОП-М-ов составляли всего 25 х 22 х 4 см, а вес — 4,5 кг. По плану они могли отдаляться от своих неподвижных станций на дину кабеля, которым были к ней привязаны, т.е. на 15 метров.
Sojourner

Посадка миссии Mars Pathfinder успешно прошла 4 июля 1997 года, а контакт с ровером продлился до 27 сентября этого же года.
- Три камеры, две из которых были спаренными, образовывая стереосистему, и смотрели вперед, а одна — назад.
- Альфа-протон-рентгеновский спектрометр (APXS) для определения химического состава изучаемых пород.
- Антенна для связи с посадочной станцией, способная передавать сигнал на расстояние до 500 метров.
- Солнечная батарея, которая питала аккумулятор емкостью от 24 до 36 Ач (в зависимости от температуры).

Если вы крайне удивлены тем фактом, что столь передовой научный инструмент как марсоход обладает настолько слабыми техническими характеристиками, то спешу разъяснить. Космическая IT-инфраструктура довольно значительно отличается от земной и просто не успевает за темпами ее развития. Дело в том, что помимо необходимости простой надежности техники (любой глюк, баг или отказ может стоить миллиарды), космическая среда крайне агрессивна. Даже на Марсе, где есть какое-никакое, а магнитное поле, которое защищает поверхность от радиационного излучения, оно слабее земного примерно в 800 раз. Доза радиации, получаемая на поверхности планеты, составит 0,2-0,3 Гр/год, что примерно равно дозе облучения при нахождении на МКС. А во время полета к Марсу эта доза может быть в 2-3 раза выше. А раз эту дозу получает техника, это увеличивает необходимый запас ее прочности по сравнению с земными собратьями во много раз. Я когда-то даже слышал миф, что нельзя брать фотоаппараты в самолет (на высоту около 10 км), потому что там матрица может выгореть из-за космического излучения. Представьте, что тогда может произойти хотя бы немного выше.
Spirit и Opportunity

Как и в случае с миссией Pathfinder, для определения названий марсоходов был проведен конкурс под эгидой NASA. Выиграла его 9-летняя американская девочка с русскими корнями, Софи Коллиз.

Панорама кратера Эребус (кликабельна)
- PanCam, панорамную камеру, делавшую цветные снимки с разрешением 1024 х 1024. Используется для изучения текстуры, цвета и структуры поверхности Марса.
- NavCams, камеру с широкоугольной линзой относительно низкого разрешения, которая используется для навигации.
- Микрокамеру (MI), способную делать снимки камней и пород с близкого расстояния в высоком разрешении (1024 x 1024) для их подробного изучения.
- HazCams, система из двух черно-белых камер с углом обзора в 120 градусов, используемых для обнаружения и определения препятствий.
- Три спектрометра: Mini-TES, MIMOS II, APXS, которые нужны для анализа химического состава изучаемого грунта.
- Магниты, используемые для сбора пыли и определяющие таким образом ее магнитные свойства.
- Инструмент для бурения, способный высверливать отверстия в скальных породах диаметром 45 мм и глубиной 5 мм.


Закат Солнца в Кратере Гусева, Spirit (кликабельно).

Кратер Виктория, Opportunity (кликабельно).
Результаты
Curiosity
6 августа 2012 года на Марс успешно сел марсоход Curiosity (англ. любопытство). Хотя он был значительно больше своих предшественников — 899 кг (~340 кг на Марсе) с параметрами 3,1 х 2,7 х 2,1 м — и значительно лучше оснащен в плане аппаратуры, цели его были примерно такими же: изучать поверхность Марса и искать свидетельства воды и, может, даже жизни.


Давайте пройдемся по аппаратуре, установленной на марсоходе, коей, к слову, немало:

Как и договаривались, об установленном компьютере поговорим отдельно. На Curiosity установлено два идентичных компьютера (один основной, один запасной) с процессорами RAD750 с частотой в 200 МГц, 256 кБ EEPROM, 256 МБ DRAM и аж 2 ГБ флеш-накопителя. За время работы на Марсе на первом компьютере произошел сбой, после чего пришлось полностью перейти на запасной аппарат. Сейчас работоспособность первого компьютера была восстановлена, однако перебираться на него обратно командный пункт не торопится.

Эффект присутствия фотографирующего создан за счет того, что в вышеупомянутой фотографии было использовано 55 снимков, склеенных воедино. При этом рука-манипулятор, с помощью которой и было сделано данное фото, аккуратно вырезана. NASA даже выпустило специальный ролик, объясняющий, как все было сделано.
Для более полного эффекта можете надеть красно-синие очки и насладиться стереопарой.


Модели трех марсоходов в сравнении друг с другом и людьми (кликабельно).
Будущие марсоходы
Исследования Марса с помощью движущихся аппаратов не планируют прекращать. В частности, NASA хочет запустить новую миссию с участием марсохода уже к 2020 году.
Но американцы — не единственные, кто занимается подобным. ESA, Европейское Космическое Агентство, также планирует запуск ровера в рамках миссии ExoMars. Строит его компания Astrium (часть корпорации, производящей Airbus), в недрах которой мне даже удалось побывать и воочию наблюдать за аппаратом, который в ближайшем (по меркам космоса) будущем будет бороздить просторы Красной Планеты.

Марсоход на переднем плане, а я — четвертый справа (кликабельно).
Эпилог
На этом все. Конечно, каждый из рассмотренных объектов достоин отдельного гораздо более подробного обсуждения. Я же попытался свести воедино все самое интересное, при этом стараясь не перегрузить. Если у вас есть какие-нибудь вопросы, то я по возможности развернуто отвечу вам в комментариях, так что не стесняйтесь спрашивать.
До новых встреч!
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Читайте также: