
Как изменяется скорость дтп при ослаблении возбуждения
Обновлено: 02.07.2024
Глава третья ЭЛЕКТРОМЕХАНИЧЕСКИЕ СВОЙСТВА ДВИГАТЕЛЕЙ
3.1. Общие сведения
Наиболее широкое применение в электроприводе промышленных установок находят следующие двигатели: асинхронные двигатели, двигатели постоянного тока с независимым, смешанным и последовательным возбуждением, синхронные двигатели, вентильно-индукторные двигатели и линейные. Двигатели постоянного тока используются в электроприводе механизмов, требующих по технологическим условиям регулирования скорости в широком диапазоне. При этом двигатели со смешанным и последовательным возбуждением, как правило, применяются в разомкнутых системах тягового электропривода. Двигатели с независимым возбуждением в настоящее время являются основой замкнутых систем регулируемого электропривода и наиболее широко используются в массовых тиристорных электроприводах постоянного тока. Асинхронные короткозамкнутые и синхронные двигатели имеют основное применение в массовых нерегулируемых электроприводах. Благодаря конструктивной простоте и меньшей металлоемкости подавляющее число нерегулируемых электроприводов малой и средней мощности выполняется на базе асинхронных короткозамкнутых двигателей. В нерегулируемых электроприводах средней и особенно большой мощности применяются синхронные двигатели, которые рассчитываются на работу с опережающим cos и могут служить источником реактивной мощности для питающихся от той же сети асинхронных двигателей и тиристорных электроприводов постоянного тока. Асинхронные двигатели с фазным ротором применяются в электроприводах механизмов, требующих регулирования скорости, либо при необходимости ограничения пусковых токов, потребляемых из сети электроприводом. Проектирование, наладка и эксплуатация электроприводов и схем их электроснабжения требуют глубоких знаний свойств электрических машин с позиций их использования.
Для облегчения понимания и усвоения материала данной темы необходимо повторить ряд основополагающих вопросов из курса электрических машин. К их числу относятся устройство машин постоянного и переменного тока и назначение их основных элементов, статические механические характеристики, понятие реакции якоря и условий коммутации токов на коллекторе машины постоянного тока, представления о магнитном поле машины при холостом ходе и под нагрузкой и об основных его характеристиках. Полезно запомнить ряд основных соотношений, таких, как выражения ЭДС вращения и электромагнитного момента машины, схемы замещения и векторные диаграммы машин переменного тока, частотные характеристики апериодического звена, изученные в курсе теории автоматического управления.
Изучение свойств электромеханических преобразователей осуществляется на основе анализа статических и динамических механических характеристик, определяющих зависимость электромагнитного момента двигателя от напряжения или частоты, скорости ротора и параметров электрических цепей.
3.2. Математическое описание процессов преобразования энергии в двигателе постоянного тока с независимым возбуждением
Двигатель постоянного тока с независимым возбуждением имеет обмотку якоря и обмотку возбуждения, которые в общем случае получают питание от независимых источников постоянного тока. Необходимым условием непрерывного процесса электромеханического преобразования энергии является протекание переменных токов хотя бы по части обмоток машины. Выполнение этого условия в машине постоянного тока обеспечивается работой коллектора, коммутирующего постоянный ток, поступающий в якорную обмотку со стороны источника питания, с частотой эл, равной электрической скорости ротора. Таким образом, с точки зрения внутренних процессов двигатель постоянного тока является машиной переменного тока и уравнения, описывающие его механическую характеристику, являются частным случаем обобщенного математического описания процессов электромеханического преобразования энергии.
Модели двигателя постоянного тока соответствует включение обмоток двухфазной обобщенной машины по схеме, показанной на рис. 3.1, а. Здесь обмотка статора по оси включена на постоянное напряжение uв, а обмотка по оси пока не используется. Обмотки фаз 2d и 2q ротора питаются переменными токами i2d и i2q от преобразователя частоты ПЧ, осуществляющего коммутацию токов i2d и i2q в функции угла поворота ротора эл, с частотой эл. Если в качестве ПЧ используется механический коммутатор — коллектор машины, то схема на рис. 3.1, а представляет собой модель двигателя постоянного тока. В случае, когда в качестве ПЧ используется вентильный преобразователь частоты, коммутируемый датчиком углового положения ротора ДУ, эта же схема является схемой модели вентильного двигателя. Поэтому анализ электромеханических свойств двигателей постоянного тока в пределах допущений, лежащих в основе общей модели, справедлив и для вентильного двигателя на базе синхронной машины, получающего питание от мощной сети постоянного тока. В рассматриваемой модели МДС статора создается постоянным током возбуждения iв = i1, поэтому она ориентирована по оси и неподвижна в пространстве. Соответственно и МДС ротора при вращении ротора со скоростью должна быть неподвижна относительно статора, а это возможно при условии, что МДС ротора вращается относительно ротора против его вращения со скоростью - . Для выполнения данного условия необходимо, чтобы обмотки фаз ротора обтекались переменными токами i2d и i2q, изменяющимися с частотой эл по закону


Рис. 3.1. Двухфазная модель двигателя постоянного тока
Магнитодвижущая сила ротора в этом случае будет вращаться относительно ротора со скоростью - в соответствии с выбранным чередованием фаз, оставаясь неподвижной относительно статора.
Так как поле неподвижно относительно статора, для получения математического описания динамических процессов преобразования энергии в двигателе постоянного тока целесообразно использовать преобразование , , d, q -> , (к = 0). Осуществим с помощью формул (2.16) преобразование токов i2d и i2q к осям , :

Следовательно, в осях , действительным переменным токам обмотки ротора эквивалентна одна якорная обмотка, обтекаемая постоянным током iя и создающая поле, неподвижное в пространстве и направленное по оси , совпадающей с осью щеток двигателя. В реальной машине по оси щеток направлены также МДС обмоток дополнительных полюсов ДП и компенсационной обмотки КО, с учетом которых схема модели двигателя постоянного тока с независимым возбуждением в осях , представлена на рис. 3.1,б. Для получения уравнений динамической механической характеристики двигателя постоянного тока можно непосредственно воспользоваться преобразованными уравнениями обобщенной машины в осях , :

(3.1)
В соответствии с рис. 3.1,6 в (3.1) можно принять

Показанные на рис. 3.1,б обмотки машины, расположенные на статоре по оси , непосредственно в процессе электромеханического преобразования энергии не участвуют. Обмотка ДП обтекается током якоря и обеспечивает вблизи оси щеток , т. е. в зоне, где осуществляется коммутация тока в проводниках обмотки якоря, магнитное поле такого направления и значения, при котором процессы коммутации протекают наиболее благоприятно. Компенсационная обмотка КО является распределенной обмоткой, закладываемой в пазы на главных полюсах аналогично якорной обмотке. Вследствие протекания по ней тока якорной цепи она создает МДС, компенсирующую МДС реакции якоря по поперечной оси . В машинах без компенсационной обмотки эта реакция якоря искажает форму поля под главными полюсами и в связи с насыщением магнитопровода создает размагничивающую продольную составляющую. Благодаря действию КО влияние поперечной реакции якоря на поле главных полюсов существенно уменьшается. С учетом сказанного можно выразить потокосцепления обмоток через токи:

(3.2)
Здесь Lв — полная индуктивность обмотки возбуждения, а Lя — суммарная индуктивность рассеяния обмоток ЯО, ДП и КО, так как основная МДС обмотки ЯО по оси компенсируется МДС компенсационной обмотки. Соответственно сопротивление Rя включает в себя все сопротивления обмоток якорной цепи двигателя. С учетом введенных обозначении и (3.2) система уравнений (3.1) запишется в виде

(3.3)
Нетрудно видеть, что первые два уравнения полученной системы представляют собой уравнения Кирхгофа для цепей возбуждения и якоря машины, причем последний член уравнения для цепи якоря есть ЭДС двигателя:

(3.4)
где k = pnN/2а - конструктивный коэффициент; N - число активных проводников; а — число параллельных ветвей якорной обмотки. Момент в (3.3) с учетом (3.4) определяется соотношением

(3.5)
Следовательно, для записи уравнений механической характеристики двигателя постоянного тока можно, как это принято, непосредственно использовать схему его цепей на постоянном токе, приведенную на рис. 3.2. На этой схеме и в дальнейшем изложении вспомогательные обмотки ДП и КО не показываются, а их сопротивления и индуктивности рассеяния учитываются в Rя и Lя. Получение уравнений (3.3) из уравнений обобщенной машины, выполненное здесь, имеет целью показать универсальные возможности методики описания динамических процессов преобразования энергии. С учетом (3.4) и (3.5) систему (3.3) можно представить в виде
(3.6)
Рис. 3.2. Естественная схема включения двигателя с независимым возбуждением
Математическое описание механической характеристики двигателя постоянного тока (3.6) при переменном потоке нелинейно в связи с тем, что ЭДС двигателя е и электромагнитный момент М пропорциональны произведениям потока соответственно на скорость и ток якоря. Во многих случаях двигатель с независимым возбуждением работает при постоянном потоке Ф = const, при этом уравнения механической характеристики линеаризуются и после преобразований математическое описание динамических процессов преобразования энергии в двигателе с независимым возбуждением представляется в виде следующего уравнения механической характеристики:

(3.7)
Подстановка М=kФiя в (3.7) дает уравнение электромеханической характеристики:

(3.8)
Как частный результат полученного математического описания могут быть определены уравнения статических электромеханической и механической характеристик двигателя. При постоянном потоке уравнения этих характеристик с помощью (3.7) и (3.8) при dM/dt = diя/dt = 0 записываются в виде

(3.9)

(3.10)
Рассматривая полученные уравнения, можно заключить, что при Ф = const электромеханическая и механическая характеристики двигателя с независимым возбуждением линейны. Поэтому положение каждой характеристики может быть охарактеризовано двумя точками: точкой идеального холостого хода, в которой Iя=0; М = 0, и точкой короткого замыкания, в которой = 0. В соответствии с (3.9) и (3.10) первой из них соответствует скорость идеального холостого хода:

(3.11)
Второй соответствуют момент Мкз и ток Iкз короткого замыкания. Их можно определить, решив (3.9) и (3.10) относительно тока и момента:

(3.12)

(3.13)
Положим в этих уравнениях = 0, получим

(3.14)
Важным показателем электромеханических свойств двигателя является модуль статической жесткости механической характеристики ст. Зависимость ст от параметров двигателя получим, продифференцировав в соответствии с (2.48) уравнение (3.13) по скорости:

(3.15)
Следовательно, модуль статической жесткости определяется соотношением

(3.16)
С помощью (3.11) и (3.16) уравнение статической механической характеристики двигателя с независимым возбуждением может быть записано в следующих формах:

(3.17)

(3.18)

(3.19)

Уравнение электромеханической характеристики с учетом (3.11) и (3.14) может иметь следующие формы записи:

(3.20)

(3.21)
Чтобы включить или отключить ослабление возбуждения электродвигателей в определенных точках внешней характеристики генератора, а также подать сигнал для последовательно-параллельного переключения электродвигателей, на тепловозах применяют реле перехода. [16]
Обычно применяют две ступени ослабления возбуждения , что позволяет трижды использовать во время разгона тепловоза один и тот же гиперболический участок внешней характеристики генератора и при широком диапазоне изменения скорости движения тепловоза добиться сравнительно узкого диапазона изменения напряжения генератора. [18]
Для включения цепи управления ослаблением возбуждения тяговых электродвигателей необходимо включить тумблер УП. Включение реле перехода РП1 настраивают на / 5 - й позиции контроллера машиниста при токе тягового генератора 3050 - 3100 А, а реле РП2 - при токе тягового генератора 2850 - 2900 А. [20]
Если подъем короткий, то ослабление возбуждения не снимают до вступления на перевал, а если крутой и затяжной, то во избежание перегрева якорей двигателей ослабление возбуждения постепенно снимают. [21]
Для увеличения скорости движения предусмотрено ослабление возбуждения тяговых двигателей . [23]
Включение 2 - й ступени ослабления возбуждения происходит аналогично при помощи реле РП2 и контактора ВШ2, подключающего параллельно обмоткам С ] - С2 электродвигателей 1 - 6 резисторы СШ1 - СШб 2 - й ступени ослабления возбуждения. [24]
Как отмечалось ранее, включение ослабления возбуждения во время разгона также экономит электроэнергию, поскольку после перехода на более высокое соединение двигателей нет необходимости выдерживать главную рукоятку контроллера на нескольких реостатных позициях. Однако при очень тяжелых поездах использование ослабления возбуждения во время разгона может привести к снижению технической скорости. Ведь, чтобы не произошло большого броска тока при переходе на ослабленное возбуждение, дольше задерживаются на безреостатной позиции, дожидаясь спада тока. При поездах среднего и малого веса это время незначительно и не влияет на общее время хода поезда по перегону. [25]
При неисправности в цепях управления ослаблением возбуждения отключается тумблер ТУП. [26]
Она может быть повышена при ослаблении возбуждения тягового двигателя . [28]
Поскольку реостатное торможение осуществляется при глубоком ослаблении возбуждения тяговых двигателей , то по условиям коммутации допускать токи якорей свыше 900 А не рекомендуется. [29]
Для дальнейшего увеличения скорости движения используют ослабление возбуждения . [30]
Автор: Евгений Живоглядов.
Дата публикации: 13 марта 2013 .
Категория: Статьи.
Естественные скоростная и механическая характеристики, область применения
В двигателях последовательного возбуждения ток якоря одновременно является также током возбуждения: iв = Iа = I. Поэтому поток Фδ изменяется в широких пределах и можно написать, что
Коэффициент пропорциональности kФ в значительном диапазоне нагрузок, при I (0,8 – 0,9) Iн вследствие насыщения магнитной цепи kФ начинает несколько уменьшаться.
При использовании соотношения (1) для двигателя последовательного возбуждения вместо выражений (7), (9) и (8), представленных в статье "Общие сведения о двигателях постоянного тока", получим
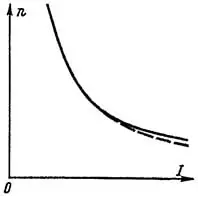 |
| Рисунок 1. Естественная скоростная характеристика двигателя последовательного возбуждения |
Скоростная характеристика двигателя [смотрите выражение (2)], представленная на рисунке 1, является мягкой и имеет гиперболический характер. При kФ = const вид кривой n = f(I) показан штриховой линией. При малых I скорость двигателя становится недопустимо большой. Поэтому работа двигателей последовательного возбуждения, за исключением самых маленьких, на холостом ходу не допускается, а использование ременной передачи неприемлемо. Обычно минимально допустимая нагрузка P2 = (0,2 – 0,25) Pн.
Естественная характеристика двигателя последовательного возбуждения n = f(M) в соответствии с соотношением (3) показана на рисунке 3 (кривая 1).
Поскольку у двигателей параллельного возбуждения M ∼ I, а у двигателей последовательного возбуждения приблизительно M ∼ I ² и при пуске допускается I = (1,5 – 2,0) Iн, то двигатели последовательного возбуждения развивают значительно больший пусковой момент по сравнению с двигателями параллельного возбуждения. Кроме того, у двигателей параллельного возбуждения n ≈ const, а у двигателей последовательного возбуждения, согласно выражениям (2) и (3), приблизительно (при Rа = 0)
Поэтому у двигателей параллельного возбуждения
а у двигателей последовательного возбуждения
Таким образом, у двигателей последовательного возбуждения при изменении момента нагрузки Mст = M в широких пределах мощность изменяется в меньших пределах, чем у двигателей параллельного возбуждения.
Поэтому для двигателей последовательного возбуждения менее опасны перегрузки по моменту. В связи с этим двигатели последовательного возбуждения имеют существенные преимущества в случае тяжелых условий пуска и изменения момента нагрузки в широких пределах. Они широко применяются для электрической тяги (трамваи, метро, троллейбусы, электровозы и тепловозы на железных дорогах) и в подъемно-транспортных установках.
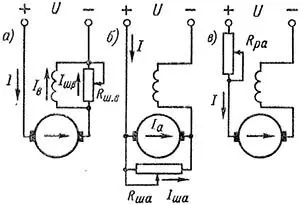 |
| Рисунок 2. Схемы регулирования скорости вращения двигателя последовательного возбуждения посредством шунтирования обмотки возбуждения (а), шунтирования якоря (б) и включения сопротивления в цепь якоря (в) |
Отметим, что при повышении скорости вращения двигатель последовательного возбуждения в режим генератора не переходит. На рисунке 1 это очевидно из того, что характеристика n = f(I) не пересекает оси ординат. Физически это объясняется тем, что при переходе в режим генератора, при заданном направлении вращения и заданной полярности напряжения, направление тока должно измениться на обратное, а направление электродвижущей силы (э. д. с.) Eа и полярность полюсов должны сохраняться неизменными, однако последнее при изменении направления тока в обмотке возбуждения невозможно. Поэтому для перевода двигателя последовательного возбуждения в режим генератора необходимо переключить концы обмотки возбуждения.
Регулирование скорости посредством ослабления поля
Регулирование n посредством ослабления поля производится либо путем шунтирования обмотки возбуждения некоторым сопротивлением Rш.в (рисунок 2, а), либо уменьшением числа включенных в работу витков обмотки возбуждения. В последнем случае должны быть предусмотрены соответствующие выводы из обмотки возбуждения.
Так как сопротивление обмотки возбуждения Rв и падение напряжения на нем малы, то Rш.в также должно быть мало. Потери в сопротивлении Rш.в поэтому малы, а суммарные потери на возбуждение при шунтировании даже уменьшаются. Вследствие этого коэффициент полезного действия (к. п. д.) двигателя остается высоким, и такой способ регулирования широко применяется на практике.
При шунтировании обмотки возбуждения ток возбуждения со значения I уменьшается до
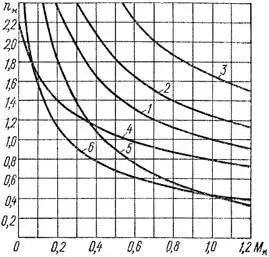 |
| Рисунок 3. Механические характеристики двигателя последовательного возбуждения при разных способах регулирования скорости вращения |
Регулирование скорости путем шунтирования якоря
При шунтировании якоря (рисунок 2, б) ток и поток возбуждения возрастают, а скорость уменьшается. Так как падение напряжения Rв × I мало и поэтому можно принять Rв ≈ 0, то сопротивление Rш.а практически находится под полным напряжением сети, его значение должно быть значительным, потери в нем будут велики и к. п. д. сильно уменьшится.
Кроме того, шунтирование якоря эффективно тогда, когда магнитная цепь не насыщена. В связи с этим шунтирование якоря на практике используется редко.
На рисунке 3 кривая 4 представляет собой характеристику n = f(M) при
Регулирование скорости включением сопротивления в цепь якоря
Регулирование скорости включением сопротивления в цепь якоря (рисунок 2, в). Этот способ позволяет регулировать n вниз от номинального значения. Так как одновременно при этом значительно уменьшается к. п. д., то такой способ регулирования находит ограниченное применение.
Выражения для скоростной и механической характеристик в этом случае получим, если в равенствах (2) и (3) заменим Rа на Rа + Rра. Характеристика n = f(M) для такого способа регулирования скорости при Rра* = 0,5 изображена на рисунке 3 в виде кривой 5.
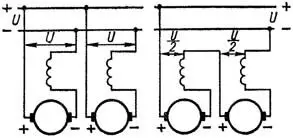 |
| Рисунок 4. Параллельное и последовательное включение двигателей последовательного возбуждения для изменения скорости вращения |
Регулирование скорости изменением напряжения
Этим способом можно регулировать n вниз от номинального значения с сохранение высокого к. п. д. Рассматриваемый способ регулирования широко применяется в транспортных установках, где на каждой ведущей оси устанавливается отдельный двигатель и регулирование осуществляется путем переключения двигателей с параллельного включения в сеть на последовательное (рисунок 4). На рисунке 3 кривая 6 представляет собой характеристику n = f(M) для этого случая при U = 0,5Uн.
Источник: Вольдек А. И., "Электрические машины. Учебник для технических учебных заведений" – 3-е издание, переработанное – Ленинград: Энергия, 1978 – 832с.
Регулирование скорости двигателя постоянного тока независимого возбуждения изменением потока возбуждения производится в маломощной цепи обмотки возбуждения, что облегчает и удешевляет аппаратуру управления. Схема силовых цепей электропривода приведена на рис 3.11. Обмотка якоря двигателя М питается от отдельного источника напряжения U. Обмотка возбуждения LM двигателя подключена к полууправляемому выпрямителю, состоящему из диодов VD1. VD3 и тиристора VSI. Такая схема регулирования напряжения обмотки возбуждения применяется для двигателей мощностью до 100 кВт.

Рис. 3.11. Схема силовых цепей электропривода при регулировании скорости двигателя постоянного тока независимого возбуждения изменением потока возбуждения

Регулирование скорости при использовании этого способа осуществляется уменьшением потока возбуждения. Это связано с тем, что увеличение потока возбуждения требует роста напряжения на обмотке возбуждения выше номинального, а это, в свою очередь, может привести к пробою изоляции обмотки. Кроме того, номинальный поток обмотки возбуждения близок к потоку насыщения магнитной цени электродвигателя (рис. 3.12, кривая 1) и увеличение тока намагничивания не приводит к существенному росту потока возбуждения.

Рис. 3.12. Универсальная кривая намагничивания двигателя постоянного тока
На рис. 3.12 приняты следующие обозначения:

– относительное значение потока возбуждения;

– относительное значение тока возбуждения.
Так как при данном способе регулирования поток возбуждения не равен номинальному, то электромеханические и механические характеристики двигателя независимого возбуждения не будут совпадать, даже построенные в безразмерных единицах.
Анализ искусственных электромеханических характеристик проведем относительно базисной естественной электромеханической характеристики по двум характерным точкам. Скорость идеального холостого хода, определяемая по (3.6), обратно пропорциональна потоку возбуждения:

Таким образом, с уменьшением потока возбуждения скорость идеального холостого хода будет увеличиваться.
При скорости, равной нулю, остается постоянным ток короткого замыкания:


Следовательно, все электромеханические характеристики на оси абсцисс сходятся в одной точке. Искусственные электромеханические характеристики при регулировании скорости двигателя постоянного тока независимого возбуждения изменением потока возбуждения приведены на рис. 3.13, а.
Механические характеристики имеют те же скорости идеального холостого хода, что и электромеханические. Пусковой момент двигателя, определяемый но выражению

будет уменьшаться с уменьшением потока возбуждения.
Искусственные механические характеристики приведены на рис. 3.13, б. Там же отмечены точки установившейся работы при номинальном токе якоря.

Рис. 3.13. Характеристики двигателя постоянного тока независимого возбуждения при регулировании скорости изменением потока возбуждения: а – электромеханические: б – механические
Способ регулирования применяется для механизмов, работающих с постоянной мощностью.

Регулирование скорости плавное, коэффициент плавности.

Диапазон регулирования скорости обычно небольшой:. Это связано, прежде всего, с качеством балансировки электрических машин. Для двигателей специального назначения с качественной балансировкой якоря и прецизионными подшипниками диапазон регулирования может быть расширен до значений 10:1, однако увеличение диапазона регулирования сопровождается ухудшением коммутации на коллекторе двигателя.
Направление регулирования скорости – вверх от естественной характеристики. Установившиеся значения скорости ωуi увеличиваются с уменьшением напряжения на обмотке возбуждения.
Погрешность регулирования скорости, определяемая по формуле (3.25), уменьшается с уменьшением потока возбуждения.
Регулирование скорости производится с высоким КПД, так как потребление энергии при регулировании скорости уменьшается за счет снижения напряжения на обмотке возбуждения.
Читайте также: