
Кто разработал автомобильную шину can bus
Обновлено: 05.07.2024
В данной статье не будем полностью расписывать CAN протокол, а обратим внимание лишь на вещи, которые надо обязательно знать и понимать для использования или разработки электронных устройств с поддержкой CAN.
Протокол CAN был разработан для автомобильной промышленности и впоследствии стал стандартом в области создания бортовых сетей автомобилей, железнодорожного транспорта и т.д. CAN позволяет создавать сети с развитыми средствами контроля ошибок, скоростью передачи до 1Мбит/с и пакетами содержащими не более восьми байтов данных.
Канальный и физический уровни CAN
Структура узла сети CAN
Рассматриваемый нами узел сети CAN состоит из микроконтроллера, CAN контроллера и приемопередатчика (рисунок 1). Чаще всего мы используем микроконтроллеры с встроенным CAN контроллером для упрощения схемы, но иногда используется автономный контроллер CAN с интерфейсом SPI (MCP2510). Далее приемопередатчик подключается к витой паре, на концах которой размещены согласующие резисторы (терминатор) с сопротивлением 120 Ом.
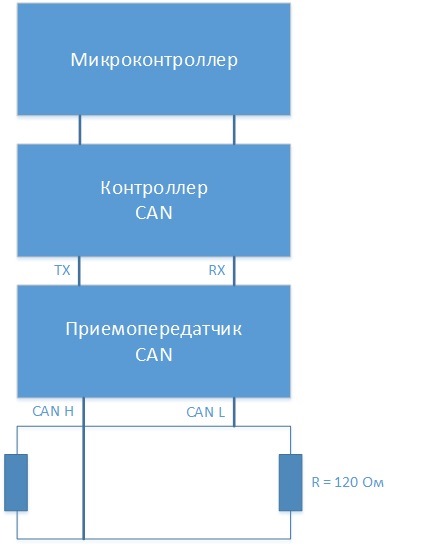
Рисунок 1 – Узел сети CAN
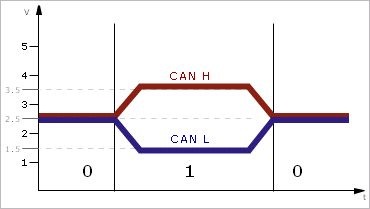
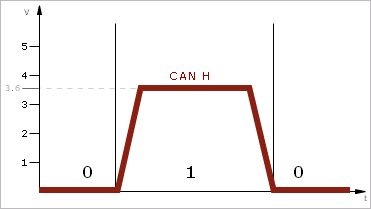
Для формирования логической единицы в витой паре, или свободной шине, на оба провода подается напряжение, равное половине разности напряжения между 0 или Vcc. Логическому нулю соответствует подача на провода линии дифференциального напряжения (рисунок 2).
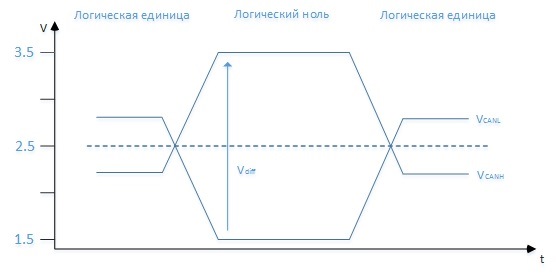
Рисунок 2 – Логические уровни на CAN-шине
Шина CAN позволяет передавать данные со скоростью 1 Мбит/c при длине кабеля не более 40 м. В обучающей литературе написано, что при снижении скорости передачи до 10кбит/с можно добиться длины сети в 1.5км.
Идентификатор (11 – битный )
Или идентификатор (29 – битный)
от 0 до 8 байт данных в пакете
Арбитраж на шине CAN
Настройка скорости передачи данных по шине CAN
Скорость передачи данных по CAN шине настраивается за счет формирования квантов времени, а не как во многих других протоколах последовательной передачи данных за счет делителя скорости. В большинстве случаев используются скорости 10Кбит/c, 20Кбит/c, 50Кбит/c, 100Кбит/c, 125Кбит/c, 500Кбит/c, 800Кбит/c, 1MBaud и настройки для этих скоростей уже посчитаны. На рисунке 4 изображено окно выбора скорости в программе PcanView.
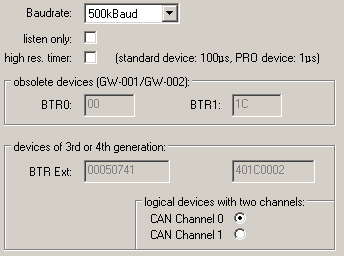
Рисунок 4 – Выбор скорости передачи данных в программе PcanView
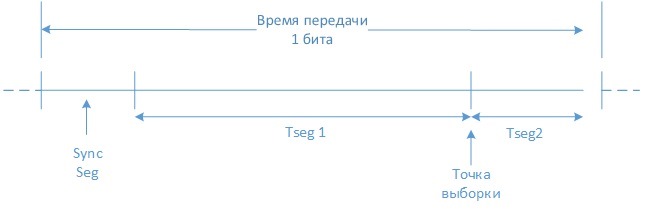
Рисунок 5 – Время передачи одного бита
Первый сегмент всегда фиксирован и равняется одному кванту. Далее идет два сегмента Tseg1 и Tseg2 и количество квантов в каждом сегменте определяется пользователем и может быть равно от 8 до 25. Точка выборки находится между Tseg1 и Tseg2, т.е. в конце первого и в начале второго сегмента. Так же пользователь может определить ширину скачка синхронизации (Synchronization Jump Width - SJW) для подстройки битовой скорости принимающего устройства, который может быть в диапазоне 1 – 4 квантов времени.
Теперь приведем формулу расчета скорости (Пример расчета скорости для CAN контроллера SJA1000):
BTR = Pclk/(BRP * (1 + Tseg1 + Tseg2))
BTR – скорость передачи данных,
Pclk – частота работы CAN контроллера,
BRP – значение предделителя частоты генератора скорости передачи
Tseg1 – первый сегмент
Tseg2 – Второй сегмент
Для проверки возьмем уже посчитанную скорость 125Кбит/c и попробуем получить настройки вручную. Pclk возьмем 16 МГц.
BRP = 16МГц /(125K * (1 + Tseg1 + Tseg2))
Затем подбираем интервал передачи бита находящийся в диапазоне от 8 до 25 квантов времени, так что бы получилось целое значение BRP. В нашем случае если взять (1 + Tseg1 + Tseg2) = 16, то BRP будет равен 30.
Далее нужно подобрать соотношение между Tseg1 и Tseg2, которое даст нам желаемое положение точки выборки (Sample Point – SP).
SP = ((1 + Tseg1 + Tseg2) * 70)/100
Подставляем значения и получаем 16 * 0.7 = 11.2, что соответствует соотношению Tseg1 = 10, Tseg2 = 5, т.е. 1 + 10 + 5 = 16. Далее смотрим если Tseg2 >= 5, то SJW = 4, если Tseg2
Рисунок 6 – Настройка CAN фильтра
Рисунок 10 – Поле Transmit
Понятное дело, что добиться полноценного управления креслом в таком случае не получиться, т.к. мы не можем исключить из сети пакеты заводского пульта управления, но эта проблема вполне решаема.
Итог
Мы увидели как при определенных усилиях и навыках можно создавать собственные электронные системы с использованием высокотехнологичного протокола CAN и как можно подключаться, исследовать и управлять устройствами подключенными к автомобильной CAN шине.

Арбитраж
В шине CAN биты 0 и 1 имеют ещё одно название: рецессивный уровень и доминантный уровень, соответственно. Если двумя разными передатчиками будет одновремнно передан рецессивный и доминантный уровни, то доминантный уровень подавит рецессивный. Этим механизмом подавления обеспечивается арбитраж на шине. Каждый передатчик одновремнено считывает то, что он предаёт в шину. Передатчик с более низким приоритетом вынужден отпустить шину, так как чужой доминантный уровень с более высоким приоритетом исказил его предачу. В то же время, пакет с более высоким уровнем остался неизменным. Передатчик, потерявший арбитраж, может повторить попытку через некоторе время.
Физический уровень
В автомобиле может применяться несколько типов шин CAN.
Высокоскоростной CAN (High speed) применяется в основном в сети управления двигателем и управления шасси. Там, где необходима высокая скорость реакции. Скорость обмена по этой шине 500 или 250 кбит/сек.
Схема подключения ЭБУ к высокоскоростной шине CAN
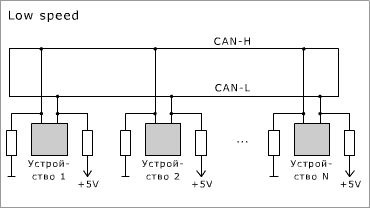
Низкоскоростной CAN (Low speed) применяется в сети управления кузова. Скорость обмена по этой шине, как правило, равняется 125 кбит/сек.
Схема подключения ЭБУ к низкоскоростной шине CAN
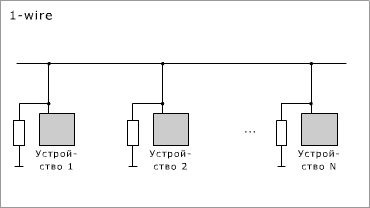
Однопроводный CAN (1-wire) Это удешевлённый варинат Low speed CAN, применяется в основном концерном GM. Используется для коммуникации между ЭБУ кузова машины. Работает на скорости 33,3 кбит/сек.
Схема подключения ЭБУ к однопроводной шине CAN
Надёжность
Двухпроводная шина сохраняет свою работоспособность при обрыве или замыкании одного из проводов (для двухпроводной шины).
Фазы работы
Шина CAN используется в автомобилях достаточно давно. Изначально шина CAN использовалась в простых конфигурациях. Например, для надёжной и быстрой связи между ЭБУ мотора и ЭБУ автоматической коробки передач. В этой конфигурации шина использовалась только для передачи данных. В ЭБУ заводилась линия питания и линия от замка зажигания, диагностика производилась по отдельным К-линиям, идущим из каждого ЭБУ.
В более современных автомобилях, по шине CAN передаётся не только управляющая, но и диагностическая информация. Помимо этого, шина CAN стала управлять системой питания ЭБУ. В этой конфигурации все ЭБУ подключены к общему питанию и шине CAN. Замок зажигания является электронным блоком управления и информация о включении зажигания передаётся от него по CAN шине.
Можно выделить четыре основные фазы работы шины:
Спящий режим
В этом режиме все ЭБУ, кроме ЭБУ замка, находятся в выключенном состоянии. На драйвер CAN подается питание. Драйвер так же находится в спящем состоянии. При этом, его энергопотребление составляет около 0,3 мА.
Пробуждение
Когда вставляется ключ зажигания или открывается дверь, замок выдаёт доминантное состояние в шину CAN. Это приводит к пробуждению CAN драйверов в спящих ЭБУ. Драйверы при обнаружении активности на шине включают стабилизаторы питания в своих ЭБУ.
Активный режим
В активном режиме ЭБУ постоянно обмениваются информацией. Энергопотребление каждого предатчика при доминантных уровнях может достигать 80 мА.
Засыпание
В момент выключения зажигания, по шине CAN выдаётся команда на выключение, после чего каждый ЭБУ сам себя обесточивает и преходит в спящий режим.
Примечание:
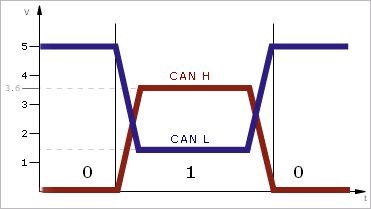
Для однопроводной шины CAN сигнал пробуждения имеет уровень 12 В, обычный обмен 0-4 В.
Немного отступлю от первоисточника.
Самый главный плюс, это очень высокая помехозащищённость сигнала. В чём прикол? Одновременно идут два дублирующих сигнала, только один высокий, второй низкий. Ловят они помеху. Помеха воздействует одинаково на оба сигнала. А на выходе у нас одинаковый уровень. Два уровня сигнала компенсируют помеху. Наглядно это выглядит вот так:
CAN-шина не имеет никакого отношения к автомобильным покрышкам. Дело в том, что в электронике "шиной" называют систему, по которой передаются данные. Это своего рода река с ручейками, если говорить проще. Что касается аббревиатуры, расшифровывающейся как Controller Area Network (сеть контроллеров), то за ней стоит стандарт промышленной сети для объединения в единую сеть различных исполнительных устройств и датчиков.
Принцип работы CAN-шины
CAN-шина, будучи системой цифровой связи и управления электронными устройствами, позволяет осуществлять обмен информацией между блоками управления. Сеть имеет три основных режима работы – активный при включенном зажигании, спящий при выключенном зажигании и, наконец, режим пробуждения и засыпания, когда зажигание включают и выключают.
CAN-шина выполняет ряд задач, среди которых ускорение передачи сигналов к разным системам, механизмам и устройствам, уменьшение количества проводов, упрощение подсоединения и работы дополнительных устройств.
Виды CAN-шин
Существует три основных вида.
Силовые обеспечивают синхронизацию и обмен данными между ЭБУ двигателя и основными агрегатами и системами автомобиля – коробкой передач, зажиганием и другими. "Комфортные" нужны, соответственно, для работы опций комфорта. Например, климатической системы, электропривода зеркал и обогрева сидений.
Информационно-командные введены для обмена данными между ЭБУ и такими вспомогательными информационными комплексами как навигационная система.
Как передается информация
Итак, CAN-шина представляет собой сеть, по которой происходит обмен информацией между устройствами. Возьмем для примера блок управления двигателем – он имеет не только основной микроконтроллер, но и CAN-устройство, которое формирует и рассылает импульсы по шинам H (CAN-высокий) и L (CAN-низкий), которые называются витая пара.
Сигналы рассылаются по витой паре трансивером или приемопередатчиком. Он нужен для целого ряда задач – усиления сигналов, защиты линии в случае повреждения CAN-шины, создания условий помехозащищенности передаваемых импульсов и регулировки скорости их передачи. В автомобильной промышленности применяются передатчики двух типов с говорящими названиями High Speed и Fault Tolerant. Первый обеспечивает передачу данных на высокой скорости, до 1 мегабита в секунду. Второй не столь быстрый и передает в секунду до 120 килобит в секунду, но при этом допускает отклонение от параметров CAN-шины и не столь чувствителен к ее качеству.
Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате образуется общая нагрузка шины CAN.
Общее сопротивление нагрузки зависит от числа подключенных к шине электронных блоков управления и исполнительных механизмов.
Рис. 2. Фрагмент CAN-шины с распределением нагрузки в проводах: CAN High CAN Low
Системы и блоки управления автомобиля имеют не только различные нагрузочные сопротивления, но и скорости передачи данных, все это может препятствовать обработке разнотипных сигналов.Для решения данной технической проблемы используется преобразователь для связи между шинами.Такой преобразователь принято называть межсетевым интерфейсом, это устройство в автомобиле чаще всего встроено в конструкцию блока управления, комбинацию приборов, а также может быть выполнено в виде отдельного блока.
Рис. 3. Блок-схема межсетевого интерфейса
Схемы CAN-шины
Это позволяет производить компьютерную диагностику при помощи опроса блоков по шине.
Диагностическое устройство преобразует цифровые коды и сигнал в абсолютные значения либо коды ошибок.
В спящем режиме CAN-шина полностью не бездействует. Большинство автомобилей используют шину для организации сбора информации дла системы сигнализации и охраны, собирая информацию по шине о датчиках проникновения, контактных устройствах.
Разновидности функций шин
Существуют разные типы представленного устройства.
- КАН-шина агрегата силового. Это быстрый канал, который передает послания со скоростью 500 кбит/с. Его главная задача заключается в коммуникации блоков управления, например трансмиссия-двигатель.
- Система "Комфорт" - более медлительный канал, передающий данные со скоростью 100 кбит/с. Он связывает все устройства системы "Комфорт".
- Информационно-командная программа шины также передает сигналы медленно (100 кбит/с). Ее основное предназначение - обеспечить связь между обслуживающими системами, например телефоном и навигацией.
Протоколом предусматривается использование при обмене информацией посредством шины CAN четырех типов команд.
II - резистор сопротивления;
В процессе приема-передачи информации на проведение одной операции отводится определенное время. Если оно вышло, формируется фрейм ошибки. Error Frame также длится определенное количество времени. Неисправный блок автоматически отключается от шины при накоплении большого количества ошибок.
Функциональность системы
Команда состоит из 3 разделов: имени, значения события, времени наблюдения за переменной величиной.
Когда компьютер коммуникационной системы запрашивает показатель состояния параметра, он посылается в приоритетной очередности.
Разрешение конфликтов на шине
В процессе передачи информации время, указанное в нем, не теряется даже при наличии конфликтного положения системы.
Физические составляющие
Устройство шины состоит, помимо кабеля, из нескольких элементов.
Микросхемы приемопередатчика часто встречаются от компании Philips, а также Siliconix, Bosch, Infineon.
Сам проводник в зависимости от конструкции может быть экранированным или неэкранированным. Концевое сопротивление может отходить от классического и находиться в диапазоне от 108 до 132 Ом.
Скорость передачи данных CAN-шины
Все составляющие сети CAN должны иметь единую скорость передачи информации. Однако данный стандарт не задает одного определенного параметра, ограничиваясь лишь максимальным пределом – 1Мбит/с. Изменения объема передаваемого кадра должно успеть распространиться по всей длине сети, что ставит в обратную зависимость скорости от протяженности – чем длиннее провод, тем ниже скорость. Для передачи 1Мбита за 1секунду нужная длина должна составлять не менее 40 метров. Добавьте к этому объективные факторы, снижающие скорость – защита от помех и разветвленная сеть, где происходят множественные отражения сигнала.
В угоду ускорения процесса разработчики уменьшают протяженность проводов, одновременно увеличивая число цепей с возможностью подключения большего количества приборов. Например, общая длина шины, составляющая 10 метров, способна пропускать через себя кадры, со скоростью 2 Мбит/c, с 64 подключенными приборами. Если автомобиль снабжен большим числом электрооборудования, то добавляется одна, две цепи или более.
Сегодня, все современные автомобили, учитывая огромное множество различных электронных систем и датчиков, становятся большими компьютерами на колесах. Чтобы упорядочить управление электронных систем в авто, была придумана CAN-шина. Давайте постараемся понятье ее принципы работы и что это вообще такое.
Немного истории про автомобильную CAN шину.
Самые первые автомобили обходились без мозговых центров, но и времена тогда были соответствующие. Двигатель автомобиля на тот момент запускался при помощи магнитно-электрического устройства, преобразовывая кинетические энергии в электрическую.
Но с развитием машиностроительной индустрии, автомобили все больше и больше опутывались проводами, а с 1970 годов, по количеству встроенных датчиков автомобиль начал соперничать с самолетом. И чем больше различных электронных опций или устройств размещалось в автомобиле, тем острее становился вопрос о рационализации электрических цепей в автомобиле.
В момент микропроцессорной революцией решение проблемы стало возможным:

BMW 8 Series E31 (1989-1999) – убийца Феррари
И после непродолжительного времени, а именно 2001 году в Европе автомобили стали оснащаться CAN-шиной в обязательном порядке, а в 2012 году был выпущен автомобиль с повышенной скорости передачи данных. В связи с колосальными изменениями, автомобили стали оснащаться различными, умными электронными устройствами, а организовывал работу различных датчиков и устройств так называемый CAN блок, с этого момента пошла эра цифровых автомобилей.
Принципы работы CAN-шины
Сама по себе CAN шина – это микро чип, обеспечивающий всю работу программной электроники по 2 проводам CAN_H (Сan-High) / CAN_L (Can-Low) с высокой передачей данных. По каждому из провода передается больше сотни различных управляющих сигналов одновременно, коммутируя между собой различные устройства и контролеры в автомобиле, но и тут предел устройства не ограничивается, при необходимости увеличения потока данных, сигнал может быть усилен до необходимого для этого уровня.
Функционал технологии CAN-шины:
Автомобиль и CAN-шина
Применение скоростной CAN-шины в автомобиле строении является главным связующим звеном совершенно всех электрических цепей в автомобиле, ее действия как позвоночник у человека, соединяющий весь функционал движения тела в целом, благодаря чему и достигается скоростная обработка данных проходимых по сети.

Что такое CAN-шина.
Современные автомобили обладают огромным количеством пот датчиков, датчико-пот датчиков соединенных в единую цифровую автомобильную сеть CAN, объединяя следующие устройства:
CAN-шина в других отраслях.

Современные автомобили обладают огромным количеством потдатчиков, датчикопотдатчиков соединенных в единую цифровую автомобильную сеть CAN, объединяя следующие устройства в автомобиле.
Простота технологии и высокая скорость передачи и обработки данных CAN стала распространятся не только в автомобилестроении, CAN-шина стала применятся в таких областях, как:
Примечание! И это еще не предел, CAN шина обязательно помимо основного своего направления – автомобили и умного дома (а автомобиль, своего рода второй дом!), найдет и своего потребителя в других областях.
Преимущества CAN-шины и недостатки.
Положительные качества CAN шины в автомобиле строении:
Как и любой электронной системе, у высокоскоростной CAN-шины есть много различных направлений развития и естественно имеются слабые стороны, а именно:
- Объем обрабатываемой информации, доступный для передачи данных одновременно ограничен учитывая современные технологии и требования различных систем;
- Большая часть обладает техническим и служебным назначением, а на более полезные данные отводится крохотная часть трафика в сети (есть к чему стремиться, я думаю это временно);
- Не стандартизирован протокол высшего уровня.
Эта статья не претендует на полноту и абсолютную точность сведений, указанных в ней, и предназначена для ознакомления с протоколом CAN.
Содержание статьи
Шина CAN – Введение
Протокол CAN является стандартом ISO (ISO 11898) в области последовательной передачи данных. Протокол был разработан с прицелом на использование в транспортных приложениях. Сегодня CAN получил широкое распространение и используется в системах автоматизации промышленного производства, а также на транспорте.
Протокол CAN
Протокол CAN описан в стандарте ISO 11898–1 и может быть кратко охарактеризован следующим образом:
• физический уровень использует дифференциальную передачу данных по витой паре;
• для управления доступом к шине используется неразрушающее bit–wise разрешение конфликтов;
Протоколы более высоких уровней
Протоколы более высокого уровня используются для:
• стандартизации процедуры запуска, включая выбор скорости передачи данных;
Пользовательские группы и т.п.
Одним из наиболее эффективных способов повышения вашей компетентности в области CAN является участие в работе, осуществляемой в рамках существующих пользовательских групп. Даже если вы не планируете активно участвовать в работе, пользовательские группы могут являться хорошим источником информации. Посещение конференций является ещё одним хорошим способом получения исчерпывающей и точной информации.
Продукты CAN
На низком уровне принципиально различают два типа продуктов CAN, доступных на открытом рынке – микросхемы CAN и инструменты разработки CAN. На более высоком уровне – другие два типа продуктов: модули CAN и инструменты проектирования CAN. Широкий спектр данных продуктов доступен на открытом рынке в настоящее время.
Патенты в области CAN
Патенты, относящиеся к приложениям CAN, могут быть различных типов: реализация синхронизации и частот, передача больших наборов данных (в протоколе CAN используются кадры данных длиной всего лишь 8 байт) и т.п.
Системы распределённого управления
Систему распределённого управления можно описать как систему, вычислительная мощность которой распределена между всеми узлами системы. Противоположный вариант – система с центральным процессором и локальными точками ввода–вывода.
• кадр данных (Data Frame);
• удаленный кадр (Remote Frame);
• кадр ошибки (Error Frame);
• кадр перегрузки (Overload Frame).
Кадр данных
• В случае CAN 2.0A, 11–битный идентификатор и один бит, бит RTR который является определяющим для кадров данных.
• В случае CAN 2.0B, 29–битный идентификатор (который также содержит два рецессивных бита: SRR и IDE) и бит RTR.
• Поле данных (Data Field), которое содержит от 0 до 8 байт данных.
Удаленный кадр
• он явно помечен как удаленный кадр (бит RTR в поле арбитража является рецессивным), и
• отсутствует поле данных.
Основной задачей удаленного кадра является запрос на передачу надлежащего кадра данных. Если, скажем, узел A пересылает удаленный кадр с параметром поля арбитража равным 234, то узел B, если он должным образом инициализирован, должен выслать в ответ кадр данных с параметром поля арбитража также равным 234.
Кадр ошибки (Error Frame)
Кадр ошибки содержит флаг ошибки (Error Flag), который состоит из 6 бит одинакового значения (таким образом нарушая правило вставки битов) и разграничителя ошибки (Error Delimiter), состоящего из 8 рецессивных бит. Разраничитель ошибки предоставляет некоторое пространство, в котором другие узлы шины могут отправлять свои флаги ошибки после того, как сами обнаружат первый флаг ошибки.
Вот флаг ошибки:
Кадр перегрузки (Overload Frame)
Стандартный и расширенный CAN
Изначально стандарт CAN установил длину идентификатора в поле арбитража равной 11 битам. Позже, по требованию покупателей стандарт был расширен. Новый формат часто называют расширенным CAN (Extended CAN), он позволяет использовать не менее 29 бит в идентификаторе. Для различения двух типов кадров используется зарезервированный бит в поле управления Control Field.
Формально стандарты именуются следующим образом –
• 2.0A – только с 11–битными идентификаторами;
• 2.0B – расширенная версия с 29–битными или 11–битными идентификаторами (их можно смешивать). Узел 2.0B может быть
• 2.0B active (активным), т.е. способным передавать и получать расширенные кадры, или
• 2.0B passive (пассивным), т.е. он будет молча сбрасывать полученные расширенные кадры (но, смотрите ниже).
• 1.x – относится к оргинальной спецификации и её ревизиям.
Контроллеры 2.0B и 2.0A (равно, как и 1.x) совместимы. Можно использовать их все на одной шине до тех пор, пока контроллеры 2.0B будут воздерживаться от рассылки расширенных кадров.
Основной CAN (Basic CAN) и полный CAN (Full CAN)
В действительности, контроллер Full CAN может взаимодействовать с контроллером Basic CAN и наоборот. Проблемы с совместимостью отсутствуют.
Примечание о значениях идентификатора
Мы говорили, что идентификатору доступны 11 (CAN 2.0A) или 29 (CAN 2.0B) бит. Это не совсем верно. Для совместимости с определенным старым контроллером CAN (угадайте каким?), идентификаторы не должны иметь 7 старших бит установленных в логическую единицу, поэтому 11–битным идентификаторам доступны значения 0..2031, а пользователи 29–битных идентификаторов могут использовать 532676608 различных значений.
Физические уровни CAN
Шина CAN
Различные физические уровни
Физический уровень определяет электрические уровни и схему передачи сигналов по шине, полное сопротивление кабеля и т.п.
Существует несколько различных версий физических уровней: • Наиболее распространенным является вариант, определенный стандартом CAN, часть ISO 11898–2, и представляющий собой двухпроводную сбалансированную сигнальную схему. Он также иногда называется high–speed CAN.
• Существуют несколько проприетарных физических уровней.
• В былые времена, когда драйверов CAN не существовало, использовались модификации RS485.
Различные физические уровни как правило не могут взаимодействовать между собой. Некоторые комбинации могут работать (или будет казаться, что они работают) в хороших условиях. Например, приемопередатчики high–speed и low–speed могут работать на одной шине лишь иногда.
Абсолютное большинство микросхем приемопередатчиков CAN произведено компанией Philips; в число других производителей входят Bosch, Infineon, Siliconix и Unitrode.
Наиболее распространен приемопередатчик 82C250, в котором реализован физический уровень, описываемый стандартом ISO 11898. Усовершенствованная версия – 82C251.
Максимальная скорость передачи данных по шине
Максимальная скорость передачи данных по шине CAN, в соответствии со стандартом, равна 1 Мбит/с. Однако некоторые контроллеры CAN поддерживают скорости выше 1 Мбит/с и могут быть использованы в специализированных приложениях.
Low–speed CAN (ISO 11898–3, см. выше) работает на скоростях до 125 кбит/с.
Однопроводная шина CAN в стандартном режиме может передавать данные со скоростью порядка 50 кбит/с, а в специальном высокоскоростном режиме, например для программирования ЭБУ (ECU), около 100 кбит/с.
Минимальная скорость передачи данных по шине
Имейте в виду, что некоторые приемопередатчики не позволят вам выбрать скорость ниже определенного значения. Например, при использовании 82C250 или 82C251 вы можете без проблем установить скорость 10 кбит/с, но если вы используете TJA1050, то не сможете установить скорость ниже 50 кбит/с. Сверяйтесь со спецификацией.
Максимальная длина кабеля
При скорости передачи данных 1 Мбит/с, максимальная длина используемого кабеля может составлять порядка 40 метров. Это связано с требованием схемы разрешения конфликтов, согласно которому фронт волны сигнала должен иметь возможность дойти до самого дальнего узла и вернуться назад прежде чем бит будет считан. Иными словами, длина кабеля ограничена скоростью света. Предложения по увеличению скорости света рассматривались, но были отвергнуты в связи с межгалактическими проблемами.
Другие максимальные длины кабеля (значения приблизительные):
• 100 метров при 500 кбит/с;
• 200 метров при 250 кбит/с;
• 500 метров при 125 кбит/с;
• 6 километров при 10 кбит/с.
Если для обеспечения гальванической изоляции используются оптопары, максимальная длина шины соответственно сокращается. Совет: используйте быстрые оптопары, и смотрите на задержку сигнала в устройстве, а не на максимальную скорость передачи данных в спецификации.
Оконечное прерывание шины
Шина CAN стандарта ISO 11898 должна заканчиваться терминатором. Это достигается путем установки резистора сопротивлением 120 Ом на каждом конце шины. Терминирование служит двум целям:
1. Убрать отражения сигнала на конце шины.
2. Убедиться, что получает корректные уровни постоянного тока (DC).
Шина CAN стандарта ISO 11898 обязательно должна терминироваться вне зависимости от её скорости. Я повторю: шина CAN стандарта ISO 11898 обязательно должна терминироваться вне зависимости от её скорости. Для лабораторной работы может хватить и одного терминатора. Если ваша шина CAN работает даже при отсутствии терминаторов – вы просто счастливчик.
Заметьте, что другие физические уровни, такие как low–speed CAN, однопроводная шина CAN и другие, могут требовать, а могут и не требовать наличия оконечного терминатора шины. Но ваша высокоскоростная шина CAN стандарта ISO 11898 всегда будет требовать наличия хотя бы одного терминатора.
Кабель
Стандарт ISO 11898 предписывает, что волновое сопротивление кабеля номинально должно равнятся 120 Ом, однако допускается интервал значений сопротивления [108..132] Ом.
Немногие, из присутствующих сегодня на рынке, кабели удовлетворяют этим требованиям. Есть большая вероятность, что интервал значений сопротивления будет расширен в будущем.
ISO 11898 описывает витую пару, экранированную или неэкранированную. Идёт работа над стандартом однопроводного кабеля SAE J2411.
Читайте также: