
Почему у дтп возрастает ток якоря при увеличении нагрузки на его валу
Обновлено: 04.07.2024
г) уменьшится до нуля, если нагрузка превысит вращающий момент.
Как изменится частота вращения, ток обмотки статора и допустима ли работаасинхронногодвигателя,есливовремяработысмоментом,равнымполовиненоминального,сгоритплавкаявставкаодногоизтрехпредохранителейвцепистатора?
а) двигатель остановится;
б) частота вращения несколько уменьшится; в) ток в обмотке статора возрастет;
г) работа двигателя недопустима, он перегреется, его необходимо отключить.
Какойизперечисленныхспособоврегулированиячастотывращенияасинхронныхдвигателей в настоящеевремянаиболееэкономичен?
При каком способе пуска увеличивается пусковой моментасинхронногодвигателя?
а) с сопротивлением в цепи статора; б) с сопротивлением в цепи ротора;
в) при переключении обмоток статора с треугольника на звезду.
Найтиневерноеутверждениеотносительномагнитногополястатора.
а) магнитное поле статора вращается быстрее ротора;
б) чем больше полюсов у магнитного поля, тем медленнее оно вращается; в) с увеличением нагрузки на валу скорость поля уменьшается.
а) ротор имеет обмотку, состоящую из медных или алюминиевых стержней, замкнутых накоротко торцевыми кольцами;
б) цилиндрический сердечник ротора набирается из отдельных листов стали, склеенных изоляционным лаком;
в) статор выполняется сплошным, путем отливки.
а) частотное регулирование;
б) регулирование введением реостата в цепь ротора; в) регулирование изменением числа пар полюсов.
Какаямаксимальнаяскоростьвращениямагнитногополястатораасинхронногодвигателя,включенногов сетьпеременноготокапромышленной частоты.
Какой способ регулирования скорости асинхронныхдвигателейпозволяетполучитьнаиболееплавноерегулированиескоростивширокомдиапазоне?
а) регулирование введением реостата в цепь ротора; б) регулирование изменением числа пар полюсов; в) частотное регулирование.
а) f2 = f1 = 50 Гц - при любой скорости; б) f2 уменьшается;
б) n уменьшается; в) n не изменяется.
а) вращающееся; б) пульсирующее; в) бегущее.
а) в пазы сердечника ротора укладывается трехфазная обмотка, соединенная звездой;
Средиположений,описывающихконструкциюасинхронногодвигателя,указатьневерное.
а) обмотка ротора состоит из медных или алюминиевых стержней, соединенных торцевыми кольцами;
б) сердечник ротора набирается из листовой электротехнической стали; в) сердечник статора выполняется литым.
Регулирование частоты вращения. Частоту вращения электродвигателей постоянного тока регулируют: введением резисторов в цепь якоря двигателя; изменением магнитного потока; изменением напряжения, приложенного к якорю электродвигателя.
В зависимости от способа регулирования частоты вращения получаются различные искусственные механические характеристики.
При введении резисторов в цепь якоря у двигателей с независимым и параллельным возбуждением магнитный поток не изменяется, следовательно, остается постоянной частота вращения идеального холостого хода nx, но значение сопротивления вводимого резистора оказывает большое влияние на наклон механической характеристики, так как возрастает угловой коэффициент:
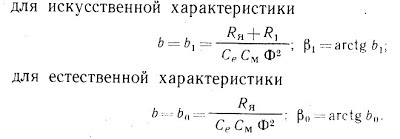
Поэтому искусственная механическая характеристика двигателей с независимым и параллельным возбуждением представляет собой прямую линию 1 (рис. 2.3), проходящую через одну точку nx с естественной характеристикой 0 и наклоном β1, определяемым значением сопротивления вводимого резистора.

Рис. 2.3. Механические характеристики электродвигателя с параллельным возбуждением
Изменение сопротивления цепи якоря для двигателя с последовательным возбуждением приведет к смещению характеристики вниз в сторону уменьшения n.
Магнитный поток электродвигателей можно изменить введением дополнительного резистора в цепь обмотки возбуждения, причем уменьшаются ток возбуждения и магнитный поток двигателя.
Изменение магнитного потока приводит к увеличению частоты вращения идеального холостого хода и изменению наклона механической характеристики у двигателей с независимым, параллельным и смешанным возбуждением.
Действительно, если Ф = Ф0, то для естественной характеристики
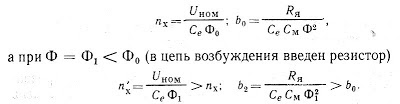
Таким образом, искусственная механическая характеристика, полученная при введении резистора в цепь обмотки возбуждения двигателя, располагается выше естественной (характеристика 2), частота вращения идеального холостого хода и наклон характеристики увеличиваются.
Изменение питающего цепь якоря напряжения при неизменном напряжении в цепи независимой обмотки возбуждения приводит у двигателей с независимым возбуждением к изменению частоты вращения идеального холостого хода при неизменном наклоне характеристики.

Следовательно, искусственная характеристика расположится ниже естественной и будет параллельна ей (характеристика 3). У двигателя, имеющего смешанное возбуждение, искусственная характеристика также будет ниже естественной.
Анализируя полученные механические характеристики электродвигателей постоянного тока, можно установить, что при одном и том же моменте на валу электродвигателя частота вращения его на разных характеристиках будет различной. Поэтому частоту вращения электродвигателей регулируют способами, используемыми для получения искусственных характеристик. Различают параметрическое и импульсное регулирование.
При параметрическом способе изменяется какой-либо параметр, который далее остается неизменным. Импульсное регулирование характеризуется периодическим ступенчатым изменением какого-либо параметра с определенной частотой.
Каждому из параметрических способов присущи свои особенности, определившие область их применения.
Введение резистора в цепь якоря приводит к уменьшению частоты вращения, причем эффективность регулирования тем больше, чем больше нагружен двигатель. Способ не экономичен из-за больших потерь энергии в дополнительном резисторе, но все же используется вследствие его простоты.
Введение резистора в цепь обмотки возбуждения приводит к увеличению частоты вращения. Этот способ экономичен, так как ток возбуждения составляет 2—5 % тока якоря и потери в резисторе невелики. Однако этот способ не позволяет получить частоту вращения двигателя меньше номинальной.
Изменение приложенного к якорю напряжения — наиболее удачный способ регулирования. Он экономичен и допускает регулирование частоты вращения в достаточно широких пределах при любых значениях нагрузки, но требует автономных источников питания с широким диапазоном изменения напряжения. Поэтому его целесообразно применять для электроприводов с частыми пусками и большим диапазоном регулирования частоты вращения электродвигателя (рулевые электроприводы, электроприводы оперативных лебедок земснарядов, гребные электрические установки и т.п.). Автономным источником питания может служить генератор постоянного тока с независимым возбуждением. Напряжение можно регулировать с помощью управляемого выпрямителя или магнитного усилителя.
Из импульсных способов регулирования двигателей постоянного тока наиболее широкое распространение получил способ изменения времени включения приложенного к якорю напряжения при постоянной частоте включения. Этот способ называется широтно-импульсным. Среднее значение приложенного к якорю напряжения

Изменяя tp при постоянном Т (изменяя скважность), регулируют среднее значение приложенного к якорю двигателя напряжения и частоту вращения электродвигателя. Частоту включения обычно выбирают в пределах 500—1000 Гц. Возможен другой способ импульсного регулирования, когда время включения tр остается постоянным, а период Т изменяется. Такой способ принято называть частотно-импульсным.
Импульсное регулирование электродвигателей постоянного тока является перспективным для тех электроприводов, для которых применяется регулирование изменением приложенного к якорю напряжения. Основным недостатком этого способа является большое число включений, приводящих к появлению больших переходных токов и требующих специальной аппаратуры.
Пуск электродвигателей постоянного тока. Как известно из курса электротехники, вращающий момент электродвигателя при пуске

Пусковой ток может значительно превышать номинальный ток двигателя из-за отсутствия противо-э. д. с. в момент пуска.
При пуске все дополнительные резисторы в цепях независимой и параллельной обмоток возбуждения должны быть введены и последовательная обмотка не шунтирована.
Отечественная промышленность изготовляет электродвигатели, пусковой ток которых по условиям коммутации должен удовлетворять неравенству Iя.п≤2,5Iя.ном.
При этом наибольший пусковой момент двигателей с независимым и параллельным возбуждением при Ф = const будет также Мп≤2,5Мном.
При таком же пусковом токе у двигателей со смешанным и последовательным возбуждением пусковой момент будет несколько больше вследствие увеличения магнитного потока, создаваемого последователь ной обмоткой, по сравнению с номинальным.
По мере увеличения частоты вращения двигателя растет противо- э.д.с., что приводит к уменьшению тока якоря
следовательно, будет уменьшаться вращающий момент двигателя.
Для обеспечения наиболее быстрого разгона двигателя необходимо поддерживать при пуске момент и ток якоря в определенных пределах.
Различают следующие способы пуска электродвигателей постоянного тока: прямой, с ограничением пусковых токов вследствие изменения сопротивления цепи якоря и импульсный.
Прямой пуск осуществляется непосредственно включением двигателя на полное напряжение сети при отсутствии добавочных элементов в цепях якоря и возбуждения. Преимуществами этого способа являются его простота и отсутствие дополнительной пусковой аппаратуры, недостатком — большой ток в цепи якоря в первоначальный момент пуска, что вызывает искрение на коллекторе, возникновение значительного момента на валу двигателя и колебания напряжения в судовой сети. Прямой пуск применяют для двигателей постоянного тока мощностью не более 1,5 кВт.
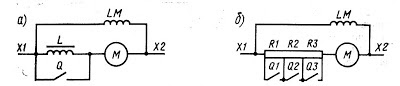
Рис. 2.4. Пуск двигателя постоянного тока
Параметрический пуск основан на предварительном изменении какого-либо параметра двигателя, ограничивающего пусковой ток, с последующим его приведением в процессе пуска к значению соответствующему номинальному режиму.
Для двигателей небольшой мощности применяют пуск с помощью реактора L, включенного последовательно в цепь якоря двигателя (рис. 2.4, а). При правильно подобранной индуктивности реактора время нарастания тока, определяемое электромагнитной постоянной времени электрической цепи,
соизмеримо с временем разгона электродвигателя, что значительно снижает пик пускового тока. Недостатками этого способа являются большие габаритные размеры и масса пускового реактора.
Наибольшее применение получил реостатный способ пуска, при этом способе в цепь якоря для ограничения пусковых токов включают дополнительный реостат (рис. 2.4, б), состоящий из трех-четырех резисторов. По мере разгона электродвигателя секции реостата поочередно закорачивают.
В некоторых случаях пользуются способом пуска, основанным на ступенчатом или плавном изменении напряжения, приложенного к якорю двигателя, от нуля до номинального значения. Этот способ возможен при питании якоря электродвигателя от отдельного источника с регулируемым напряжением. В качестве такого источника могут быть использованы генератор постоянного тока с независимым возбуждением, регулируемый трансформатор с выпрямителем, трансформатор с управляемым выпрямителем.
При импульсном пуске, так же как и при импульсном регулировании частоты вращения, может быть использован как широтно-импульсный, так и частотно-импульсный способ. В том и другом случае пуск осуществляется изменением скважности от нуля до номинального значения.
Реверсирование электродвигателей постоянного тока. Реверсирование— изменение направления вращения на противоположное. Для реверсирования необходимо изменить направление вращающего момента М = СмФIя, что возможно осуществить изменением направления тока в якоре электродвигателя или изменением направления магнитного потока путем изменения направления тока в обмотках возбуждения.
Для двигателей с независимым и параллельным возбуждением предпочтительнее первый способ по сравнению со вторым по сле-дующим причинам:
во-первых, при размыкании обмотки возбуждения, предшествующем ее переключению, возникает значительная э. д. с. самоиндукции
затрудняющая процесс коммутации и увеличивающая вероятность пробоя изоляции;
во-вторых, при реверсировании двигатель сначала необходимо остановить, а затем он начинает вращаться в обратную сторону. Но уменьшение магнитного потока вызовет не уменьшение, а увеличение частоты вращения.
Для двигателей со смешанным возбуждением реверсирование изменением направления магнитного потока еще более затруднено по сравнению с двигателем с параллельным возбуждением, так как у него необходимо переключать две обмотки возбуждения. Для двигателей с последовательным возбуждением оба способа равноценны.
Торможение электродвигателей постоянного тока. При режиме торможения электромагнитный момент на валу электродвигателя направлен в сторону, противоположную направлению вращения.
Режимы торможения используются, когда необходимо: остановить электропривод, вращающийся по инерции; остановить электропривод, вращающийся под действием момента, создаваемого рабочей машиной, например: под действием опускаемого подъемным краном груза; замедлить вращение электропривода при воздействии момента, создаваемого рабочей машиной.
Чтобы осуществить режим торможения электродвигателя, нужно изменить направление вращающего момента на его валу, при этом двигатель переходит в генераторный режим работы. В зависимости от использования энергии различают три вида торможения: рекуперативное, динамическое и противовключением. Рекуперативное торможение сопровождается возвратом энергии в питающую сеть. При динамическом торможении и торможении противовключением энергия превращается в тепловую в элементах цепи якоря двигателя.
Торможение с отдачей энергии в сеть, или рекуперативное торможение, наступает, тогда, когда электродвигатель под действием момента рабочей машины (идущий под уклон железнодорожный состав, опускающийся на подъемном кране груз) разгоняется до частоты вращения, превышающей частоту вращения идеального холостого хода. В этом случае э.д.с. якоря будет больше напряжения в сети, ток изменит свое направление и машина будет работать в режиме генератора, отдавая энергию в сеть. При этом направление вращения двигателя не изменится. Механическая характеристика двигателя с параллельным возбуждением О (рис. 2.5) при торможении с отдачей энергии в сеть будет являться продолжением характеристики

Рис. 2.5. Механические характеристики двигателя постоянного тока при рекуперативном торможении
в область отрицательных моментов. Область режима торможения обозначена цифрой II, область двигательного режима — цифрой I.
У двигателей со смешанным возбуждением при переходе в режим торможения ток в последовательной обмотке меняет свое направление, и поэтому она противодействует параллельной обмотке, размагничивая машину и уменьшая момент торможения (штриховая линия). Во избежание этого последовательную обмотку закорачивают или отключают (характеристика I).
Двигатели с последовательным возбуждением не могут работать в режиме торможения с отдачей энергии в сеть, так как с увеличением частоты вращения ток двигателя уменьшается и он размагничивается. Его э.д.с. никогда не может быть больше напряжения в сети.
Динамическое торможение осуществляют отключением якоря от сети и замыканием его на резистор. Различают два вида динамического торможения: с независимым возбуждением и с самовозбуждением.

Рис. 2.6. Схемы включения и механические характеристики двигателей при динамическом торможении
При торможении двигателей с независимым и параллельным возбуждением применяют торможение с независимым возбуждением (рис. 2.6, а).
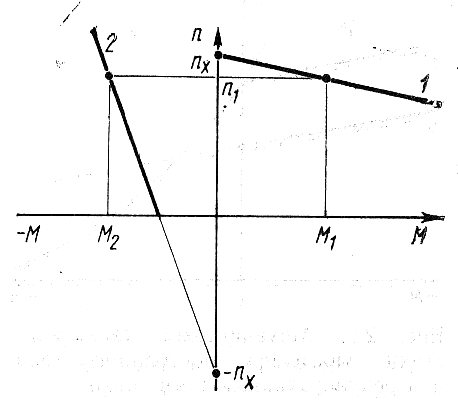
Рис. 2.7. Механическая характеристика двигателя постоянного тока с параллельным возбуждением при торможении противовключением
В этом случае якорь Двигателя отключается от питающей сети и включается на тормозной резистор R1, обмотка возбуждения остается включенной в сеть.
У двигателя со смешанным возбуждением последовательная обмотка отключается или закорачивается.
Торможение двигателя с последовательным возбуждением при питании обмотки возбуждения от сети (рис. 2.6, б) более эффективно, чем торможение с самовозбуждением (рис. 2.6, в), однако для ограничения тока в обмотке необходимо ее подключать через дополнительный резистор R2, мощность рассеяния которого должна равняться мощности электродвигателя
Уравнение механической характеристики при динамическом торможении (при U = 0)
При Ф = const (независимое возбуждение) оно представляет собой уравнение прямой линии.
При самовозбуждении в связи с изменением магнитного потока характеристика искривляется, а при некотором значении частоты вращения самовозбуждение и торможение двигателя прекращаются.
На рис. 2.6, г показаны механические характеристики для динамического торможения: 0 — для торможения с независимым возбуждением; 1 — для торможения с самовозбуждением. Штриховой линией показан участок, на котором торможение прекращается.
Торможение противовключением производится быстрым реверсированием двигателя по ходу, когда якорь по инерции продолжает вращаться в одном направлении, а обмотки включаются на противоположное. При этих режимах знаки пх и п противоположны, э. д. с. якоря двигателя совпадает по направлению с напряжением и ток якоря
так как в начале торможения Е ≈ U, сопротивление резистора R1 необходимое для ограничения тока до допустимых пределов, должно быть примерно в 2 раза больше пускового сопротивления двигателя. Механическая характеристика при этом способе торможения двигателя с параллельным возбуждением приведена на рис. 2.7 (характеристика 2).
Если двигатель предварительно работал с М1>0 и n1>0 на характеристике 1, то при торможении противовключением уравнение механической характеристики будет

При быстром реверсировании частота вращения двигателя не успеет измениться и режим торможения будет соответствовать точке с моментом М2 и частотой вращения n1 на характеристике 2.
Из рис. 2.7 видно, что при торможении противовключением в момент остановки двигателя (n = 0) момент на его валу не обращается в нуль. Поэтому после остановки двигатель может начать вращаться в обратную сторону. Во избежание этого двигатель после остановки должен быть отключен от сети.
При работе электродвигателя магнитное поле якоря действует на магнитное поле полюсов. Следовательно, у двигателей, так же как и у генераторов, наблюдается реакция якоря. При одном и том же направлении тока в обмотке якоря и той же полярности полюсов направление вращения двигателя обратно направлению вращения генератора.
При нагрузке машины в обмотке якоря протекает ток, который создает свое магнитное иоле. Поле якоря, воздействуя на магнитное поле полюсов, изменяет и искажает его. При нагрузке машины по магнитной цепи замкнется результирующий магнитный потом Фр, создаваемый совместным действием намагничивающих сил полюсов и якоря. Результирующий магнитный поток Фр не равен потоку полюсов Фт, созданному намагничивающими силами обмотки возбуждения при холостом ходе. Воздействие поля, созданного током в якоре при нагрузке машины, на магнитное поле полюсов называется реакцией якоря.
Реакция якоря искажает магнитное поле машины, делает его несимметричным относительно оси полюсов.
Вопрос 46. Пусковые свойства асинхронных двигателей. Пуск двигателя с фазным ротором. Схема и процесс пуска.Пусковые свойства двигателя определяются в первую очередь значением пускового тока Iп или его кратностью Iп/ Iном и значением пускового момента Мп или его кратностью Мп/Мном. Двигатель, обладающий хорошими пусковыми свойствами, развивает значительный пусковой момент при сравнительно небольшом пусковом токе. Однако получение такого сочетания пусковых параметров в асинхронном двигателе сопряжено с определенными трудностями. В начальный момент пуска скольжение s = 1, поэтому, пренебрегая током х.х., пусковой ток можно определить подставив s = 1:

Iп = U1/ .
Пусковой момент по

Mп =
Улучшить пусковые свойства двигателя можно увеличением активного сопротивления цепи ротора r2', так как в этом случае уменьшение пускового тока сопровождается увеличением пускового момента. В то же время напряжение U1 по-разному влияет на пусковые параметры двигателя: с уменьшением U1 пусковой ток уменьшается, что благоприятно влияет на пусковые свойства двигателя, но одновременно уменьшается пусковой момент. Целесообразность применения того или иного способа улучшения пусковых свойств двигателя определяется конкретными условиями эксплуатации двигателя и требованиями, которые предъявляются к его пусковым свойствам. Помимо пусковых значений тока Iп и момента Мп пусковые свойства двигателей оцениваются еще и такими показателями: продолжительность и плавность пуска, сложность пусковой операции, ее экономичность (стоимость и надежность пусковой аппаратуры и потерь энергии в ней). Пуск двигателя с фазным ротором. Наличие контактных колец у двигателей с фазным ротором позволяет подключить к обмотке ротора пусковой реостат. При этом активное сопротивление цепи ротора увеличивается до значения R2 = r2' + rд', где rд' — электрическое сопротивление пускового реостата, приведенное к обмотке статора. При выборе сопротивления пускового реостата rдоб исходят из условий пуска двигателя: если двигатель включают при значительном нагрузочном моменте на валу, сопротивление пускового реостата rдо6 выбирают таким, чтобы обеспечить наибольший пусковой момент; если же двигатель включают при небольшом нагрузочном моменте на валу, когда пусковой момент не имеет решающего значения для пуска, оказывается целесообразным сопротивление ПР rдоб выбирать несколько больше значения, соответствующего наибольшему пусковому моменту. В этом случае пусковой момент оказывается несколько меньшим наибольшего значения М п.mах, но зато пусковой ток значительно уменьшается.
Вопрос 48. Короткозамкнутые АД с улучшенными пусковыми характеристиками. Двигатель с глубокими пазами пазами на роторе и с двумя клетками на роторе. Конструкция, принцип действия, достоинства и недостатки. Двигатель с глубокими пазами на роторе. От обычного асинхронного двигателя этот двигатель отличается тем, что у него пазы ротора сделаны в виде узких глубоких щелей, в которые уложены стержни обмотки ротора, представляющие собой узкие полосы. С обеих сторон эти стержни приварены к замыкающим кольцам. Обычно глубокий паз имеет соотношение размеров hп/ bп = 9÷10, где hп, bп — высота и ширина паза.
В момент включения двигателя, когда частота тока в роторе имеет наибольшее значение (f2 = f1), индуктивное сопротивление нижней части каждого стержня значительно больше верхней. Объясняется это тем, что нижняя часть стержня сцеплена с большим числом магнитных силовых линий поля рассеяния. Почти весь ток ротора проходит по верхней части стержня, поперечное сечение которой намного меньше сечения всего стержня. Это равноценно увеличению активного сопротивления стержня ротора, что, как известно, способствует росту пускового момента двигателя и некоторому ограничению пускового тока. Таким образом, двигатель с глубокими пазами на роторе обладает благоприятным соотношением пусковых параметров: большим пусковым моментом при сравнительно небольшом пусковом токе.
Двигатель с двумя клетками на роторе.Еще лучшими пусковыми свойствами обладают асинхронные двигатели с двумя короткозамкнутыми клетками на роторе: рабочей клеткой 1, стержни которой расположены в нижнем слое, и пусковой клеткой 2, стержни которой расположены в верхнем слое, ближе к воздушному зазору. В момент пуска двигателя ток ротора проходит в основном по верхней (пусковой) клетке, обладающей малым индуктивным сопротивлением. При этом плотность тока в стержнях пусковой клетки намного больше плотности тока в стержнях рабочей клетки. Повышенное активное сопротивление этой клетки обеспечивает двигателю значительный пусковой момент при пониженном пусковом токе. По мере увеличения частоты вращения ротора уменьшается частота тока в роторе, при этом индуктивное сопротивление рабочей клетки уменьшается, и распределение плотности тока в стержнях пусковой и рабочей клеток становится почти одинаковым. В итоге происходит перераспределение вращающего момента между клетками: если в начальный период пуска момент создается главным образом токами пусковой клетки, то по окончании периода пуска вращающий момент создается в основном токами рабочей клетки. Максимальное значение момента пусковой клетки вследствие ее повышенного активного сопротивления смещено в сторону скольжений, близких к единице. Вращающие моменты от обеих клеток направлены в одну сторону, поэтому результирующий момент двигателя равен сумме моментов пусковой Мпк и рабочей Мраб.к клеток М = Мп.к + Мраб.к Двигатели с двумя клетками на роторе по сравнению с асинхронными двигателями обычной конструкции имеют повышенную стоимость, что объясняется сложностью конструкции.
Вопрос47. Пуск асинхронных двигателей с короткозамкнутым ротором. Различные способы пуска, их схемы, достоинства и недостатки.Пуск непосредственным включением в сеть. Этот способ пуска, отличаясь простотой, имеет существенный недостаток: в момент подключения двигателя к сети в обмотке статора возникает большой пусковой ток, в 5—7 раз превышающий номинальный ток двигателя. При небольшой инерционности исполнительного механизма частота вращения двигателя быстро достигает установившегося значения и пусковой ток также быстро спадает, не вызывая перегрева обмотки статора. Но такой значительный бросок тока в питающей сети может вызвать в ней заметное падение напряжения. Однако этот способ пуска благодаря своей простоте получил наибольшее применение для двигателей мощностью до 38—50 кВт и более (при достаточном сечении жил токоподводящего кабеля). При необходимости уменьшения пускового тока двигателя применяют какой-либо из способов пуска короткозамкнутых двигателей при пониженном напряжении.
Пуск при пониженном напряжении. Пусковой ток двигателя пропорционален подведенному напряжению U1, уменьшение которого вызывает соответствующее уменьшение пускового тока.
Вопрос 49. Регулирование частоты вращения АД. Основные способы, их техническая реализация. Достоинства и недостатки.Частота вращения ротора асинхронного двигателя n2 =n1(1 - s) = (f160/ p)(l - s). Из этого выражения следует, что частоту вращения ротора асинхронного двигателя можно регулировать изменением какой - либо из трех величин: скольжения s, частоты тока в обмотке статора f1 или числа полюсов в обмотке статора 2р.
Регулирование частоты вращения изменением скольжения sвозможно тремя способами: изменением подводимого к обмотке статора напряжения, нарушением симметрии этого напряжения и изменением активного сопротивления обмотки ротора. Регулировка частоты вращения изменением скольжения происходит только в нагруженном двигателе. В режиме холостого хода скольжение, а следовательно, и частота вращения остаются практически неизменными. Регулирование частоты вращения изменением частоты тока в статоре.Этот способ регулирования (частотное регулирование) основан на изменении синхронной частоты вращения n1 = f1 60/ р. Для осуществления этого способа регулирования необходим источник питания двигателя переменным током с регулируемой частотой. В качестве таких источников могут применяться преобразователи частоты (ПЧ). Чтобы регулировать частоту вращения, достаточно изменить частоту тока f1. Но с изменением частоты f1 = ω1p/ (2π) будет изменяться и максимальный момент. Поэтому для сохранения неизменным перегрузочной способности, необходимо одновременно с изменением частоты f1 изменять и напряжение питания U1. Подводимое к двигателю напряжение необходимо изменять пропорционально изменению частоты тока.Частотное регулирование двигателей позволяет плавно изменять частоту вращения в широком диапазоне (до 12:1). Регулирование частоты вращения изменением числа полюсов обмотки статора. Частота вращения ротора асинхронного двигателя обратно пропорциональна количеству пар полюсов. Количество пар полюсов не может быть дробным числом, поэтому регулирование — ступенчатое. Изменение числа пар полюсов можно получить укладкой в пазы статора не одной, а двух обмоток. В зависимости от того, какая обмотка работает, такая и частота вращения. Недостаток такого способа — плохое использование обмоточного провода, по тому что всегда работает только одна обмотка. Также изменение числа пар полюсов можно получить использованием обычной обмотки путем переключения катушечных групп. Многоскоростные двигатели имеют недостатки: Большие габариты и масса.
Вопрос 50. Устройство, принцип действия и пуск однофазного асинхронного двигателя. Фазосдвигающие элементы. Асинхронные конденсаторные двигатели. Устройство, принцип действия, отличие от однофазного. Включение без фазосдвигающего элемента.По своему устройству однофазный асинхронный двигатель аналогичен трехфазному и состоит из статора, в пазах которого уложена однофазная обмотка (см. рис. 8.8), и короткозамкнутого ротора. Особенность работы однофазного асинхронного двигателя заключается в том, что при включении однофазной обмотки статора С1—С2 в сеть МДС статора создает не вращающийся, а пульсирующий магнитный поток с амплитудой Фmах. При этом ось магнитного потока остается неподвижной в пространстве. Когда по обмотке статора протекает однофазный ток и ротор неподвижен, создается пульсирующее магнитное поле. Результирующий вращающий момент при пуске равен нулю и двигатель без специальных пусковых устройств не сможет прийти во вращение. С этой целью на статоре двигателя помимо рабочей обмотки применяют еще одну обмотку — пусковую. Эти обмотки располагают на статоре обычно так, чтобы их оси были смещены относительно друг друга на 90 эл. град. Кроме того, токи в обмотках статорадолжны быть сдвинуты по фазе относительно друг друга. Для этого в цепь пусковой обмотки включают фазо смещающий элемент (ФЭ), в качестве которого могут быть применены активное сопротивление, индуктивность или ем кость. По достижении частотой вращения значения близкого к номинальному, пусковую обмотку Вотключают с по мощью реле. Таким образом, во время пуска двигатель является двухфазным, а во время работы — однофазным. Асинхронный конденсаторный двигатель имеет на статоре две обмотки, занимающие одинаковое число пазов и сдвинутые в пространстве относительно друг друга на 90 эл. град. Одну из обмоток — главную — включают непосредственно в однофазную сеть, а другую — вспомогательную — включают в эту же сеть, но через рабочий конденсатор Сра6. В отличие от рассмотренного ранее однофазного асинхронного двигателя в конденсаторном двигателе вспомогательная обмотка после пуска не отключается и остается включенной в течение всего периода работы, при этом емкость Сраб создает фазовый сдвиг между токами.Таким образом, если однофазный асинхронный двигатель по окончании процесса пуска работает с пульсирующей МДС статора, то конденсаторный двигатель - с вращающейся. Поэтому конденсаторные двигатели по своим свойствам приближаются к трехфазным двигателям. Емкость конденсатора зависит от значения тока, который, в свою очередь, определяется нагрузкой. При изменении нагрузки вращающееся магнитное поле становится эллиптическим. Так как пусковой ток в однофазных двигателях в 3-4 раза больше номинального, то используют так называемую пусковую емкость, которая в 3-4 больше рабочей. По окончании разгона двигателей пусковую емкость отключают.
Вопрос 51. Однофазный двигатель с экранированными полюсами. Устройство, принцип действия, основные характеристики.Для создания пускового момента в асинхронных двигателях малой мощности применяют конструкцию с явно выраженными экранированными полюсами, на которых располагают однофазную обмотку. Полюсыимеют расщепленную на две части конструкцию, при этом на одну из частей каждого полюса надет короткозамкнутый виток (экран) в виде медного кольца. Ротор двигателя короткозамкнутый. При включении обмотки статора в сеть пульсирующий поток наводит в короткозамкнутом витке (экране) ток, препятствующий нарастанию магнитного потока и вызывающий фазовый сдвиг потока в этой части полюса. В результате потоки в обеих частях каждого полюса оказываются сдвинутыми по фазе относительно друг друга, что, в свою очередь, приводит к образованию в двигателе вращающегося магнитного поля. Часто для улучшения пусковых и рабочих характеристик двигателя между полюсами помещают магнитные шунты в виде стальных пластинок, замыкающих края полюсных наконечников полюсов статора.Асинхронные двигатели с экранированными полюсами нереверсивны — ротор всегда вращается в направлении от неэкранированной части полюса к экранированной. Обычно эти двигатели изготовляют мощностью не более 100 Вт и применяют для привода устройств, не требующих большого пускового момента (электропривод вентиляторов, электропроигрывателей и т. п.)Недостатки: большие габариты, небольшой пусковой момент, малый коэффициент мощности, невысокий КПД, отсутствие реверса.
Вопрос 52. Трехфазный АД в режиме однофазного. Схемы включения, расчет и выбор конденсатора.В этом случае трехфазный двигатель используют как конденсаторный, включив его по одной из схем. Величину рабочей емкости Сраб (мкФ) при промышленной частоте (50 Гц) можно ориентировочно определить по одной из эмпирических формул:
При подборе рабочей емкости необходимо следить за тем, чтобы величина тока в обмотке статора при установившемся режиме работы с требуемой нагрузкой на валу не превышала номинального значения, указанного в паспорте двигателя. Если пуск двигателя осуществляется вхолостую или с небольшой нагрузкой на валу, то пусковая емкость не требуется. Если же двигатель пускается в ход со значительной нагрузкой на валу, то пусковая емкость Спуск необходима. Величину этой емкости принимают Спуск = (2,5 3) Сраб. В этом случае пусковой момент двигателя становится близким к номинальному. При необходимости дальнейшего увеличения пускового момента емкость Спуск следует увеличить до (6ч-8) Сраб. При использовании трехфазного двигателя в однофазном конденсаторном режиме (рис. 23.7) его полезная мощность не превышает 70 — 80% номинальной мощности при его работе от трехфазной сети, а при однофазном режиме с отключением одной фазной обмотки (без ФЭ) полезная мощность двигателя не превышает 60% от мощности в трехфазном режиме.
Вопрос 53. Индукционный регулятор и фазорегулятор. Преобразователь частоты. Назначение, устройство, принцип действия.Индукционный регулятор напряжения (ИР) представляет собой асинхронную машину с фазным ротором, предназначенную для плавного регулирования напряжения. Рассмотрим работу трехфазного ИР, получившего преимущественное применение. Ротор ИР заторможен посредством червячной передачи, которая не только удерживает его в заданном положении, но и позволяет плавно поворачивать его относительно статора. Обмотки статора и ротора в ИР имеют автотрансформаторную связь, поэтому ИР иногда называют поворотным автотрансформатором.Напряжение сети U1подводится к обмотке ротора, при этом ротор создает вращающееся магнитное поле, наводящее в обмотке ротора ЭДС Е1 , а в обмотке статора — ЭДС Е2 .ИР применяются во всех случаях, где необходима плавная регулировка напряжения, например в лабораторных исследованиях.Фазорегулятор (ФР). Предназначен для изменения фазы вторичного напряжения относительно первичного при неизменном вторичном напряжении. В отличие от ИР обмотки ротора и статора ФР электрически не соединены друг с другом, т. е. имеют трансформаторную связь,поэтому ФР иногда называют поворотным трансформатором.Изменение фазы вторичного напряжения осуществляется поворотом ротора относительно статора. Первичной обмоткой в ФР обычно является обмотка статора. Фазорегуляторы применяются в устройствах автоматики (для фазового управления) и измерительной технике (для проверки ваттметров и счетчиков).Асинхронный преобразователь частоты. Как известно, частота тока в роторе асинхронной машины зависит от скольжения (f2 = sf1).Это свойстве асинхронных машин используется в асинхронных преобразователях частоты (АПЧ). Обмотку статора АПЧ подключают к трехфазной сети с частотой f1, а ротор приводят во вращение приводным двигателем (ПД) в направлении против вращения поля статора. В этом случае в обмотке ротора наводится ЭДС Е2 частотой f2 >f1, так как скольжение s >1. Указанная ЭДС через контактные кольца и щетки создает на выходе АПЧ напряжение. Если требуется получить на выходе АПЧ напряжение частотой f2
Работа асинхронного двигателя под нагрузкой .
В рабочем режиме ротор двигателя вращается с частотой n 2 , меньшей частоты n 1 магнитного поля статора, вращающегося в том же направлении, что и ротор.
Поэтому магнитное поле, имеющее большую частоту, скользит относительно ротора с частотой (об/мин), равной разности частот поля и ротора, т. е. ns = n 1 - n 2 .
Относительное отставание ротора от вращающегося магнитного поля статора характеризуется скольжением S .
Скольжение представляет собой отношение разности частот вращения магнитного поля статора и вращающегося ротора к частоте поля статора
S = ns/n 1 = (n 1 - n 2 )/n 1 .
Эта формула определяет скольжение в относительных единицах.Скольжение может быть также выражено в процентах:
S = ((n 1 - n 2 )/n 1 ) x 100% .
Если ротор неподвижен ( n 2 = 0 ), то скольжение равно единице или 100%.
Если ротор вращается синхронно с магнитным полем, т. е. с одинаковой частотой
( n 2 = n 1 ), то скольжение равно нулю.
Таким образом, чем больше частота вращения ротора, тем меньше скольжение.
В рабочем режиме асинхронного двигателя скольжение мало.
У современных асинхронных двигателей скольжение при полной нагрузке составляет 3—5%, т.е. ротор вращается с частотой, незначительно отличающейся от частоты магнитного поля статора.
При холостом ходе, т. е. при отсутствии нагрузки на валу, скольжение ничтожно мало и может быть принято равным нулю.
Частоту вращения ротора можно определить из следующих соотношений:
n 2 = n 1 - ns = n 1 (1 - S) = (60f 1 /p)(1 - S) .
Двигатель будет работать устойчиво с постоянной частотой вращения ротора при равновесии моментов, т. е. если вращающий двигателя М будет равен тормозному моменту на валу двигателя Мт , который развивает приемник механической энергии, например резец токарного станка. Следовательно, можно записать: М = Мт .
Любой нагрузке машины соответствует определенная частота вращения ротора n 2 и определенное скольжение S .
Магнитное поле статора вращается относительно ротора с частотой ns и индуктирует в его обмотке эдс Е 2 , под действием которой по замкнутой обмотке ротора проходит ток I 2 .
Если нагрузка на валу машины увеличилась, т. е. возрос тормозной момент, то равновесие моментов будет нарушено, так как тормозной момент окажется больше вращающего.
Это приведёт к уменьшению частоты вращения ротора, а следовательно, к увеличению скольжения. С увеличением скольжения магнитное поле будет пересекать проводники обмотки ротора чаще, эдс E 2 , индуктированная в обмотке ротора, возрастет, а в результате как ток в роторе, так и развиваемый двигателем вращающий момент.
Скольжение и ток в роторе будут увеличиваться до значений, при которых вновь наступит равновесие моментов, т. е. вращающий момент станет равным тормозному.
Так же протекает процесс изменения частоты вращения ротора и развиваемого момента при уменьшении нагрузки двигателя. С уменьшением нагрузки на валу двигателя тормозной момент становится меньше вращающего, что приводит к увеличению частоты вращения ротора или к уменьшению скольжения.
В результате уменьшаются эдс и ток в обмотке ротора, а следовательно, и вращающий момент, который вновь становится равным тормозному моменту.
Магнитное поле статора пересекает проводники обмотки статора и индуктирует в ней эдс Е1 , которая уравновешивает приложенное напряжение сети U 1 .
Если пренебречь падением напряжения в сопротивлении обмотки статора, которое мало по сравнению с эдс, то между абсолютными значениями приложенного напряжения и эдс обмотки статора можно допустить приближенное равенство, т. е.
U 1 = E 1 .
Таким образом, при неизменном напряжении сети будет неизменна и эдс обмотки статора. Следовательно, магнитный поток в воздушном зазоре машины, так же как в трансформаторе, при любом изменении нагрузки остается примерно постоянным.
Ток обмотки ротора создает свое магнитное поле, которое направлено противоположно магнитному полю тока обмотки статора. Чтобы результирующий магнитный поток в машине оставался неизменным при любом изменении нагрузки двигателя, размагничивающее магнитное поле обмотки ротора должно быть уравновешено магнитным полем обмотки статора. Поэтому при увеличении тока в обмотке ротора увеличивается и ток в обмотке статора.
Таким образом, асинхронный двигатель подобен трансформатору, у которого при увеличении тока во вторичной обмотке увеличивается ток в первичной обмотке.
Вращающий момент асинхронного двигателя.
Вращающий момент асинхронного двигателя создается при взаимодействии вращающегося магнитного поля статора с токами в проводниках обмотки ротора. Поэтому вращающий момент зависит как от магнитного потока статора Фm , так и от тока в обмотке ротора I 2 .
Однако в процессе преобразования энергии (создании вращающего момента) участвует только активная мощность, потребляемая машиной из сети. Вследствие этого вращающий момент зависит не от тока в обмотке ротора I 2 , а только от его активной составляющей, т. е. I 2 X cos 2 , где 2 - фазный угол между эдс и током в обмотке ротора.
Таким образом, вращающий момент асинхронного двигателя определяется следующим выражением:
М = С Ф m I 2 cos 2 ,
где С - конструктивная постоянная машины, зависящая от числа ее полюсов и фаз, числа витков обмотки статора и конструктивного выполнения обмотки.
При условии постоянства приложенного напряжения магнитный поток остается также почти постоянным при любом изменении нагрузки двигателя.
Таким образом, в выражении вращающего момента величины Фm и С постоянны и вращающий момент пропорционален только активной составляющей тока в обмотке ротора, т. е. M ~ I 2 cos 2 .
Изменение нагрузки или тормозного момента на валу двигателя изменяет частоту вращения ротора и скольжение, что вызовет изменение как тока в роторе I 2 , так и его активной составляющей I 2 cos 2 .
Можно ток в роторе определить отношением эдс к полному сопротивлению, т. е.
I 2 = E 2 /Z 2 = E 2 /(R + X) и cos 2 = R 2 /(R + X) ,
где Z 2 , R 2 и X 2 — полное, активное и реактивное сопротивления фазы обмотки ротора.
Вместе со скольжением изменяется частота тока ротора.
При неподвижном роторе ( n 2 = 0 и S = 1 ) вращающееся поле с одинаковой частотой пересекает проводники обмотки статора и ротора и частота тока в роторе равна частоте тока в сети ( f 2 = f 1 ).
При уменьшении скольжения обмотка ротора пересекается магнитным полем с меньшей частотой, так что частота тока в роторе уменьшается. Когда ротор вращается синхронно с полем ( n 2 = n 1 и S = 0 ), проводники обмотки ротора не пересекаются магнитным полем, так что частота тока в роторе равна нулю f 2 = 0 . Таким образом, частота тока в роторе пропорциональна скольжению, т. е. f 2 = Sf 1 .
Активное сопротивление обмотки ротора почти не зависит от частоты, тогда как эдс и реактивное сопротивление пропорциональны частоте, т. е. изменяются с изменением скольжения, и могут быть определены следующими выражениями:
E 2 = SE и X 2 = SX ,
где Е и X — соответственно эдс и индуктивное conpoтивление фазы обмотки неподвижного ротора. Таким образом, имеем:
I 2 = SE/(R + (SX)) и cos 2 = R 2 /(R + (SX))
и вращающий момент
M I 2 cos 2 = SER 2 /(R + (SX))
Зависимость вращающего момента
асинхронного двигателя от скольжения
Следовательно, при небольших скольжениях (примерно до 20%), когда SX мало по сравнению с R 2 , увеличение скольжения вызывает повышение вращающего момента, так как при этом возрастает активная составляющая тока в роторе ( I 2 cos 2 ).
При больших скольжениях ( SX>R 2 ) увеличение скольжения будет вызывать уменьшение вращающего момента.
Таким образом, хотя и возрастает ток в роторе I 2 , но его активная составляющая I 2 cos 2 и, следовательно, вращающий момент уменьшатся вследствие значительного повышения реактивного сопротивления обмотки ротора.
На изо показана зависимость вращающего момента от скольжения.
При некотором скольжении S m (примерно 20%) двигатель развивает максимальный момент, который определяет перегрузочную способность двигателя и обычно в 2 - 3 раза превышает номинальный момент.
Устойчивая работа двигателя возможна только на восходящей ветви кривой зависимости момента от скольжения, т. е при изменении скольжения в пределах от 0 до S m . Работа двигателя на нисходящей ветви указанной зависимости, т. е. при скольжении S > S m невозможна, так как не обеспечивается устойчивое равновесие моментов.
Если предположить, что вращающий момент был равен тормозному ( M = М Т ) в точках А и Б , то при случайном нарушении равновесия моментов в одном случае оно восстанавливается, а в другом не восстанавливается.
Допустим, что вращающий момент двигателя почему-либо уменьшился (например, при понижении напряжения сети), тогда скольжение начнет увеличиваться.
Если равновесие моментов было в точке A , то увеличение скольжения вызовет увеличение вращающего момента двигателя и он станет вновь равным тормозному моменту, т. е. равновесие моментов восстановится.
Если же равновесие моментов было в точке Б , то увеличение скольжения вызовет уменьшение вращающего момента, который будет оставаться всегда меньше тормозного, т. е. равновесие моментов не восстановится и частота вращения ротора будет непрерывно уменьшаться до полной остановки двигателя.
Если приложить к валу двигателя тормозной момент, больший максимального момента, то равновесие моментов нарушится и ротор двигателя остановится.
Вращающий момент двигателя пропорционален квадрату приложенного напряжения, так как пропорциональны напряжению как магнитный поток, так и ток в роторе. Поэтому изменение напряжения в сети вызывает значительное изменение вращающего момента.
Рабочие характеристики асинхронного двигателя .
Рабочие характеристики асинхронного двигателя представляют собой зависимости скольжения S , частоты вращения ротора n2 , развиваемого момента М , потребляемого тока I1 , расходуемой мощности P1 , коэффициента мощности cos и кпд от полезной мощности Р2 на валу машины. Эти характеристики (изо) снимаются при естественных условиях работы двигателя, т. е. двигатель нерегулируемый, частота тока f1 и напряжение U1 сети остаются постоянными, а , изменяется только нагрузка на валу двигателя.
При увеличении нагрузки на валу двигателя скольжение возрастает, причем при больших нагрузках скольжение увеличивается несколько быстрее, чем при малых.
При холостом ходе двигателя скольжение очень мало ( n2 ~ n1 или S ~ 0 ).
При номинальной нагрузке скольжение обычно составляет S = 3 - 5% (0,95) .
Частота вращения ротора n2 = n1(1—S) = (60f1/p)(1 - S) .
При увеличении нагрузки на валу двигателя скольжение возрастает, а частота вращения будет уменьшаться. Однако изменение частоты вращения при увеличении нагрузки от 0 до номинальной очень не значительно и не превышает 5 % . Поэтому скоростная характеристика асинхронного двигателя является жесткой - она имеет очень малый наклон к горизонтальной оси.
Вращающий момент М , развиваемый двигателем, уравновешен тормозным моментом Мт на валу и моментом Мо , идущим на преодоление механических потерь, т. е.
М = Мт + М0 = Р2/2—М0 , где Р2 - полезная мощность двигателя, 2 - угловая скорость ротора.
При холостом ходе двигателя М = М0 ; с увеличением нагрузки на валу вращающий момент также увеличивается, причем за счет некоторого уменьшения частоты вращения ротора увеличение вращающего момента происходит быстрее, чем увеличение полезной мощности на валу.
Рабочие характеристики асинхронного двигателя
Ток I1 , потребляемый двигателем из сети, неравномерно изменяется с увеличением нагрузки на валу двигателя.
При холостом ходе cos мал и ток имеет большую реактивную составляющую.
При малых нагрузках на валу двигателя активная составляющая статора меньше реактивной составляющей, поэтому активная составляющая тока незначительно влияет на ток I1 , определяющийся в основном реактивной составляющей.
При больших нагрузках активная составляющая тока статора становится больше реактивной и изменение нагрузки вызывает большое изменение тока I1 .
Графически зависимость потребляемой двигателем мощности Р1 выражается прямой линией, незначительно отклоняющейся вверх от прямой при больших нагрузках, что объясняется увеличением потерь в обмотках статора и ротора с возрастанием нагрузки.
Коэффициент мощности изменяется в зависимости от нагрузки на валу двигателя следующим образом. При холостом ходе cos мал (порядка 0,2 ), так как активная составляющая тока статора обусловленная потерями мощности в машине, мала по сравнению с реактивной составляющей этого тока, создающей магнитный поток.
При увеличении нагрузки на валу cos возрастает (достигая наибольшего значения 0,8—0,95 ) в результате увеличения активной составляющей тока статора.
При очень больших нагрузках происходит некоторое уменьшение cos , так как вследствие значительного увеличения скольжения и частоты тока в роторе возрастает реактивное сопротивление обмотки ротора.
Кривая кпд имеет такой же вид, как в любой машине или трансформаторе. При холостом ходе кпд равен нулю. С увеличением нагрузки на валу двигателя кпд резко увеличивается, а затем уменьшается. Наибольшего значения кпд достигает при такой нагрузке, когда потери мощности в стали и механические потери, не зависящие от нагрузки, равны потерям мощности в обмотках статора и ротора, зависящим от нагрузки.
Читайте также: