
Sae j1939 volvo схема
Обновлено: 08.07.2024
Ключевые слова: протокол SAE J1939, FMS-Standard, физический уровень в соответствии с ISO 11898 (250 Кбит/с), канальный уровень данных в соответствии с SAE J1939, транспортный протокол, электронные блоки управления, диагностика, система оперативной диагностики, цифровые данные, шина CAN, контрольно-измерительные датчики
В статье рассмотрены системы цифровой связи между электронными блоками (ЭБУ) и управление устройствами машины по CAN-шине, которая собирает данные от всех устройств с процессом обмена информаций между ними для диагностирования технического состояния сельскохозяйственной автотракторной техники. Дано описание электронных систем, шины CAN, протокола SAE J1939 и FMS-Standard. Современная автотракторная техника оборудована микропроцессорными системами управления, обладающими диагностическими возможностями. Система цифровой связи и управления электрическими устройствами автотракторной техники — интерфейс CAN — позволяет собирать данные от всех устройств, обмениваться информацией между ними, управлять ими.
Keywords: SAE J1939 Protocol, FMS-Standard, physical layer in accordance with ISO 11898 (250 Kbit/s), data channel level in accordance with SAE J1939, transport Protocol, electronic control units, diagnostics, operational diagnostics system, digital data, can bus, control and measuring sensors
The article deals with the system of digital communication between electronic components (ECU) and control of the machine devices by CAN-bus, which collects data from all devices with the process of information exchange between them, to diagnose the technical condition of agricultural machinery. The description of electronic systems, can bus, SAE J1939 Protocol and FMS-Standard is given. Modern automotive equipment is equipped with microprocessor control systems that have diagnostic capabilities. The system of digital communication and control of electric devices of automotive engineering — the CAN interface — allows to collect data from all devices, to exchange information between them, to operate them.
Рассмотрим протокол SAE J1939 и FMS-Standard:
- данные могут быть недоступны во время включения/выключения главного выключателя;
- большинство значений являются достоверными примерно через 10 с после включения кнопки;
- физический уровень в соответствии с ISO 11898 (250 Кбит / с);
- уровень применения в соответствии с SAE J1939 / 71;
- канальный уровень данных в соответствии с SAE J1939 / 21;
- при расхождения между определениями в этом документе и SAE документы SAE действительны только для PGN 0x00FE6B (идентификатор водителя), PGN 0x00FE70 (комбинированный вес транспортного средства) и для PGN 0x00FEE6 (время/дата);
- приоритет / адрес источника для каждого OEM-производителя различен;
- если информация доставлена, то функция/данные должны быть представлены в соответствии со стандартом FMS;
- если информация недоступна, то функция/данные должны быть отправлены как недоступные в соответствии с SAE;
Совин К. Г., Обмен данными в автотракторной технике по CAN-шине на основе протокола SAE J1939 и FMS-Standard. Сельскохозяйственная техника: обслуживание и ремонт №6 2019. 2019;6.

При помощи CAN-Hacker Вы можете работать не только с легковым и легким коммерческим транспортом. Так же успешно можно работать и с грузовиками, тракторами, комбайнами и другой специальной техникой.
Пи работе с CAN шиной специальной техники есть одно важно преимущество перед работой с легковым транспортом – На спец.технике протокол взаимодействия по CAN шине стандартизирован в большей части и название этого стандарта SAE J1939 или FMS протокол (Fleet management system).
Рассмотрим изучение протокола FMS на примере работы с CAN шиной трактора John Deere 9460.
Подключение к CAN шине трактора осуществляется через стандартный диагностический разъем J1939
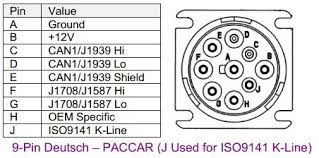
В этом разъеме нам нужны контакты C и D.
Вот так выглядит подключение к CAN шине трактора John Deere при помощи CAN-Hacker:

John Deere CAN bus connection
Подключение осуществляется на скорости 500 кбит\с. Если подключение сделано то мы увидим примерно такие данные:
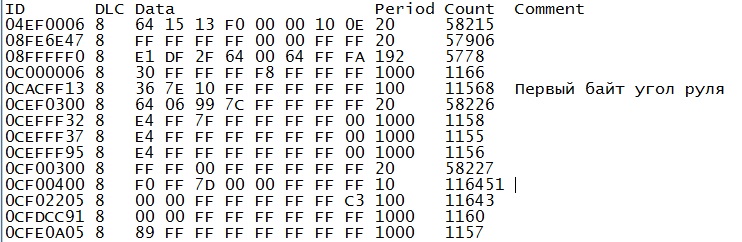
J1939 CAN bus data
Пакеты будут так же быстро изменяться, как и в автомобилях, но обратим внимание на длинные 29-битные ID. В этих ID хранится информация о передаваемых параметрах, для их разбора обратимся к описанию протокола FMS / J1939

ID протокола J1939 состоит из следующих полей:
Нас будут интересовать поля PDU Format и PDU Specific которые образуют номер передаваемого параметра, например
ID=0CF00400 имеет номер параметра F004 – средние два байта.
Остается вопрос: Как узнать какой параметр в CAN шине трактора за что отвечает? Обратимся к документу FMS-Standart description и при помощи поиска текста в документе найдем описание параметра 00F004
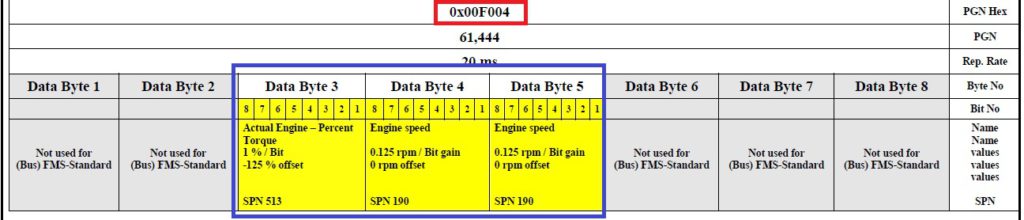
В документе указано, что 3, 4, 5 байты несут в себе информацию о текущих оборотах двигателя.
Попробуем разобрать другой принятый пакет:
ID=18FEE500 DLC=8 DATA: CD 75 00 00 FF FF FF FF
Ищем в FMS Standart Description параметр FEE5
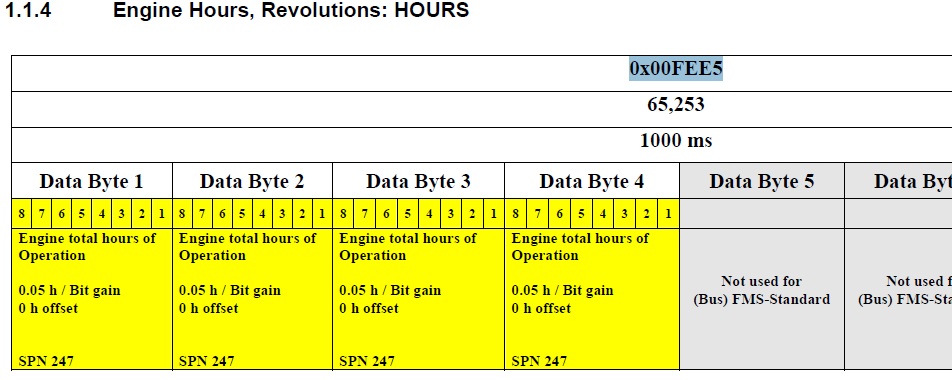
Как видим это время наработки трактора, в нашем случае первые два байта пакет CD 75, а время наработки трактора 1507.8 часов. Формула пересчета такая:
(1507.8 *10 ) *2 ->HEX = 75CD
Таким образом мы можем при помощи CAN-Hacker найти все остальные интересующие параметры: Расход топлива, скорость, нагрузку на оси и многое другое.
В каждом современном автомобиле есть много различных датчиков, которые что-то измеряют или о чем-то сигнализируют. Все эти данные собираются и обрабатываются определенными узлами (блоками) и отображаются водителю на приборной панели.
Физически это два витых провода (точнее несколько пар витых проводов), которые дополняются специальными контроллерами-узлами и трансмиттерами, усиливающими и синхронизирующими передаваемый сигнал. Создана она была для того, чтобы сократить в десятки раз километры проводов, которыми должны были питаться и соединяться все датчики в машине.
Есть множество датчиков, все они собирают информацию о состоянии автомобиля и передают её на своём языке контроллерам, которые понимают их. Каждый контроллер переводит полученные данные на единый, принятый в CAN-шине, язык и "выпускает" информацию дальше в систему.
Все контроллеры связаны между собой теми самыми двумя проводами. Возможен и обратный процесс: из единой системы — к датчикам. В итоге сотни датчиков по всей машине могут обмениваться друг с другом информацией.
По сути CAN — это сеть для передачи данных, но со своими особенностями и топологией. Но для того, чтобы организовать автоматическое распределение имён (идентификаторов) между узлами и датчиками, стандартизировать и привести к единообразию управление устройствами различных типов и производителей на разных автомобилях, на рынке стали разрабатываться протоколы более высокого уровня для CAN. Одним из таких стандартов (протоколов) и является J1939.
Изначально он был придуман для грузовиков, но в настоящее время он широко применяется в легковых автомобилях, в сельскохозяйственной технике, автобусах и так далее.
The Fleet Management Systems Interface (FMS) представляет собой стандартный протокол для работы с данными коммерческого транспорта разных производителей.
Его разработали (договорились между собой и согласовали) шесть европейских производителей: Daimler AG, MAN AG, Scania, Volvo (включая Renault), DAF Trucks и IVECO в 2002 году. Они преследовали цель — сделать процесс считывания данных и диагностики ошибок более простым и универсальным. Как итог, теперь на разных машинах, например Scania и Volvo, можно одинаково "прочитать" в CAN-шине текущую скорость или обороты двигателя.
Есть несколько поколений данного стандарта, в рамках которых меняется количество доступных стандартных, единых параметров. Сейчас их уже около 30. Наличие этой функции у многих производителей опционально при заказе нового автомобиля и "включение" её в комплектацию является платным.
Это устаревший и предшествующий J1939 протокол с очень схожим смыслом и функционалом. И про него никто бы не вспоминал, не будь нашего желания экономить :)
Дело в том, что некоторые производители, например Volvo, ряд параметров FMS-стандарта открывали для свободного чтения, а самые интересные из них, топливные например, скрывали. Получить их можно было либо приобретая специальный FMS-шлюз, либо "открывая" параметры на сервисе, естественно, не бесплатно.
Тогда наши смекалистые соседи из Литвы вспомнили про устаревший J1708, проверили — и да, здесь ничего не "скрывали", поэтому можно было достать те самые актуальные топливные параметры. По этой причине на рынке было важным и популярным, чтобы GPS трекер "умел читать" J1708.
Это быстро прикрыли, и производители автомобилей окончательно отказались от J1708. Теперь это неактуально.
Здесь, к сожалению, производителям договориться о каком-то стандарте не удалось. Их много, жёсткая конкуренция, общих задач нет, большое количество выпускаемых моделей, высокая скорость изменений и модернизации датчиков и так далее.
В результате в большинстве случаев протокол, по которому происходит обмен данными в CAN-шине легкового автомобиля, неизвестен либо нигде не описан. А потребность видеть и получать данные с бортового компьютера легкового автомобиля ничуть не меньше. Расход топлива, текущий пробег, обороты двигателя и многие другие параметры важны для контроля эффективности эксплуатации машины водителем.
К слову, на рынке есть ряд так называемых переходников. Их создатели либо добились от производителей автомобилей, либо самостоятельно подобрали нужные "правила общения" и "имена" (идентификаторы, ID) датчиков во многих моделях автомобилей. Переходники "переводят" их на язык J1939 или другие, понятные GPS трекерам, протоколы.
В своей работе мы используем такие, а в последнее время учимся подбирать протоколы самостоятельно.
Первичная цель — это получать и удалённо мониторить показания с бортового компьютера, которые видит водитель.
Вторая и более востребованная — возможность хранить историю информации и проводить в дальнейшем её анализ. Это позволяет, например:
- увидеть расхождения пробегов путевого листа водителя и одометра автомобиля;
- увидеть подкрутки спидометра;
- отслеживать необходимость прохождения ТО;
- выделять периоды "агрессивного", неэкономного вождения;
- выделять периоды, когда водитель ехал на "магните".
На основе таких данных, как: показания спидометра, факты стоянок и начала движения, приближение и прохождение контрольных точек, прибытие и выезд из базы — можно:
- составлять автоматические путевые листы;
- достаточно точно фиксировать пробеги по странам для выплаты командировочных;
- видеть точный пробег для оплаты платных дорог (если по факту);
- и многое другое.
Ну и бонусный момент: помимо стандартных вещей в некоторых протоколах можно увидеть диагностические коды ошибок и даже получать уведомления об их возникновении в системе мониторинга Wialon. Что особенно актуально для легковых автомобилей.
Наличие у прибора возможности считывать данные CAN-шины — это интересный и полезный функционал, игнорировать который не стоит.
Мы постарались помочь вам понять суть, не запутаться в названиях и буквах, и уже на одном языке вести диалог с любым поставщиком телематических услуг.
Обычно пользователи нашего сайта находят эту страницу по следующим запросам:
электросхема Volvo FH , скачать электросхему Volvo FH , панель приборов Volvo FH , система освещения Volvo FH , магнитола Volvo FH , аудиосистема Volvo FH , стеклоочиститель Volvo FH , регулировка фар Volvo FH , коды ошибок Volvo FH , электросхема Volvo FH12 , скачать электросхему Volvo FH12 , панель приборов Volvo FH12 , система освещения Volvo FH12 , магнитола Volvo FH12 , аудиосистема Volvo FH12 , стеклоочиститель Volvo FH12 , регулировка фар Volvo FH12 , коды ошибок Volvo FH12
1. Общая информация
Обзор электронного оборудования автомобиля
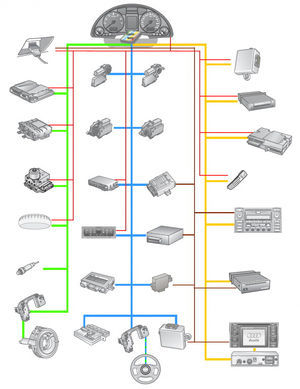
Архитектура электронной системы автомобиля постоянно развивается и совершенствуется. Она состоит из децентрализованных и независимых подсетей и блоков управления, связанных между собой магистральными CAN-сетями. Данный документ имеет целью описание основных составных частей архитектуры.
CAN (Контроллерная локальная сеть)
Магистральные сети
Две магистральные сети соединяют между собой блоки управления и подсети и обеспечивают постоянную передачу в системе больших объемов информации.
Через эти магистральные сети передаются такие данные, как:
- Данные состояния автомобиля (например, время, скорость, расход топлива)
- Сигналы управления силовой установкой
- OBD (Встроенная система диагностики)
- Данные диагностики автомобиля в соответствии с ISO14229
- Сигналы состояния и управления
- Загрузка программного обеспечения, уровень загрузки программного обеспечения (SWDL).
Протокол: SAE J1939
Скорость: 250 кбит/с
Магистраль 2
Протокол: SAE J2284
Скорость: 500 кбит/с
Подсети
Подсети - это независимые группы компонентов, соединенные с магистралями через блоки управления; каждая из подсетей передает в систему автомобиля свои собственные данные. Подсети ориентированы в основном на оборудование, а не на функции; функции реализуются в системе распределенным образом. Информация о том, какие компоненты участвуют в реализации конкретной функции, приведена отдельно в описаниях функций.
Общими для всех подсетей являются управление диагностическими данными и загрузка программного обеспечения.
- Подсеть силовой установки управляет связью между ECM (модуль управления двигателем), TECU (электронный блок управления коробкой передач), ACM (модуль управления системой доочистки выхлопных газов) и блоком управления NOx (оксид азота).
- Подсеть кабины может иметь множество различных конфигураций в зависимости от конструкции кабины. Подсеть кабины служит для обмена данными автомобиля между блоками управления кабины. Шлюзом между этой подсетью и магистральными сетями служит блок CIOM (модуль ввода/вывода кабины).
- Подсеть шасси связывает шасси с кабиной. Это соединение передает большие объемы данных в реальном времени. Подсеть шасси служит для обмена данными автомобиля между блоками управления шасси. Шлюзом между этой подсетью и магистральными сетями служит блок VMCU (главный блок управления автомобиля).
- Подсеть приложений информационно-развлекательной системы в основном занята обработкой событий. Подсеть информационно-развлекательной системы в основном передает данные, связанные с действиями водителя, визуальной и звуковой информацией. Шлюзом между этой подсетью и магистральными сетями служит блок HMIIOM (модуль ввода/вывода интерфейса "человек-машина").
- Подсеть дисплея отвечает за воспроизведение графической информации на дисплеях, в частности, в комбинации приборов. Из-за высоких требований к передаче информации в реальном времени в подсети дисплея применяется протокол, специально разработанный для этих целей.
- Подсеть безопасности отвечает за двери, окна, сигнализацию и т.п. Блок CIOM служит шлюзом между этой подсетью и магистральными сетями. Особенность этой подсети состоит в том, что часть информации передается в зашифрованном виде. 7a и 7b. Подсети активной безопасности 1 и 2 соединены с DACU (блок управления вспомогательными системами для водителя) и отвечают за передачу данных, относящихся к датчикам, камерам, антиалкогольному блокиратору и т.п., т.е. к системам помощи водителю. Шлюзом между этой подсетью и магистральными сетями служит блок DACU. 8. Подсеть климат-контроля передает данные, связанные с датчиками, панелями управления и т.п., служащими для управления климатом в кабине. Эта подсеть соединена с магистральными сетями через CCM (Модуль управления микроклиматом) и CIOM. 9. Сеть тормозной системы. 10. Сеть кузовостроителя. 11. Сеть световых приборов. 12. Сеть FMS (система управления автопарком). 13. Сеть телематики (локальная сеть). 14. OBD и диагностический разъем.
LIN (локальная коммутационная сеть)
LIN - это сеть на основе последовательной передачи данных; имеет одно ведущее устройство и до 16 ведомых. Все операции передачи данных инициируются ведущим устройством; данные пересылаются одному или нескольким ведомым устройствам. Ведомые устройства могут отвечать ведущему. Если ведомое устройство не отвечает ведущему или дает некорректный ответ, в ведущем устройстве сохраняется код DTC (Диагностический код неисправности).
Типичные ведомые устройства LIN - переключатели, рычаги, панели управления, датчики. В качестве ведущих устройств в сетях LIN выступают различные блоки управления. Пропускная способность сетей LIN в данной архитектуре составляет 9.6 кбит/с.
Примечание:
Сигналы передаются по одному проводу. В данной архитектуре сигнальный провод LIN перевит с заземленным проводом и потому может выглядеть как витая пара.
Топология LIN:
- Кабина.
- Дверь водителя.
- Дверь пассажира.
- Шасси
VMCU и FRC (блок предохранителей и реле)
Блок VMCU контролирует и хранит данные, передаваемые на некоторые из переключателей и поступающие от них, и управляет внутренним и наружным оборудованием кабины. Диагностический разъем автомобиля также присоединен к VMCU.
FRC (Fuseand Relay Centre - центр предохранителей и реле) объединен с VMCU и находится в кабине. FRC обеспечивает защищенное питание электрической системы автомобиля и подает электропитание на многие потребители автомобиля.
Панели многофункциональных переключателей
Каждая панель может содержать до четырех кулисных переключателей; в автомобиле может быть до десяти таких панелей. Панели подключены к ведущему устройству LIN в блоке CIOM. Семь панелей могут размещаться на приборной панели в LIN 2-4, две в блоке полки в LIN 1 и одна на спальном месте в LIN 5.
Местоположения переключателей могут меняться; поэтому при каждом включении питания узлов LIN или повороте ключа зажигания в положение питания дополнительного оборудования производится идентификация переключателей. Процедура идентификации определяет, были ли переключатели перемещены или удалены с момента последней проверки, и сохраняет новые местоположения.
Свободные позиции для панелей переключателей на приборной панели.
WRC (беспроводнойпульт дистанционного управления)
Беспроводной пульт дистанционного управления используется главным образом для функций пневматической подвески, распределения нагрузки и функций кузовостроителя, а также для таких функций, как наружные световые приборы и запирание/отпирание автомобиля. Большинство функций обычно используются снаружи автомобиля и когда автомобиль неподвижен. Некоторые функции можно использовать при движении на малой скорости.
Блок WRG (Блок интерфейса беспроводного дистанционного управления) (Шлюз дистанционного беспроводного доступа) служит интерфейсом между пультом дистанционного управления и сетью CAN автомобиля, а также зарядным устройством для аккумуляторной батареи пульта. Шлюз находится рядом с внутренней ручкой на передней стойке.
Электропитание
Генерация и хранение электроэнергии
Система генерации и хранения электроэнергии состоит из двух специализированных сетей, генератора и подсети с CCIOM (Центральный модуль ввода/вывода шасси) в качестве ведущего устройства. Система вырабатывает и запасает электроэнергию напряжением 24 В для питания узлов автомобиля.
При движении главным источником электропитания для узлов автомобиля является генератор; одновременно он заряжает аккумуляторные батареи. Аккумуляторные батареи служат дополнительным источником энергии, когда нагрузка становится выше нагрузочной способности генератора. Когда двигатель заглушен, единственным источником электроэнергии являются аккумуляторы. Они также служат источником энергии для запуска и предпускового подогрева двигателя.
Система автомобиля содержит ряд блоков с напряжением питания 12 В, которые питаются от генератора/аккумуляторных батарей через преобразователи постоянного напряжения 24 В/12 В. Напряжение питания 12 В имеют, например, такие блоки, как радиоприемник, телевизор, DVD-проигрыватель и некоторые розетки. Система также имеет преобразователь на 150 В для питания компрессора стояночного охладителя.
Главные плавкие предохранители в блоке предохранителей, расположенном в аккумуляторном ящике, защищают кабели питания от перегрузки. Остальные плавкие предохранители (расположенные в FRC) защищают систему от перегрузки и изолируют различные компоненты и подсети внутри автомобиля.
Главный выключатель
Для всех вариантов:
Если электропитание не выключено вручную и ключ находится в положении жилого режима или вынут из замка, автомобиль переходит в режим парковки через 12 часов отсутствия каких-либо действий. В режиме парковки, компоненты либо находятся в состоянии сна, либо отключаются. Автомобиль выходит из режима парковки после того, как двери будут отперты с радиобрелока, будет открыта дверь или после того, как ключ будет вставлен в замок зажигания.
Примечание:
Тахограф и датчик аккумуляторной батареи подключены до главного выключателя и потому активны всегда.
Базовый (MSWI-B)
Этот вариант управляется таймером и не имеет механического переключателя. Водитель не может выключить электропитание самостоятельно; режим парковки автоматически включается через 12 часов бездействия.
Шасси (MSWI-C)
В этом варианте имеется главный выключатель на шасси. При выключении электропитания главным выключателем автомобиль немедленно переходит в режим парковки. Рассоединяются только некоторые реле; большинство блоков управления переходят в режим сна.
Для выхода из режима парковки по сигналу брелока требуется вариант LOCK-REM (автомобиль с центральным замком и пультом дистанционного управления).
ADR (MSWI-A)
Имеется несколько вариантов, содержащих до трех выключателей. При выключении электропитания главным выключателем или двукратном нажатии кнопки запирания на радиобрелоке автомобиль немедленно переходит в режим парковки.
Дистанционное управление (MSWI-R)
Главный выключатель управляется только с радиобрелока. При выключении электропитания двукратным нажатием кнопки запирания на радиобрелоке автомобиль немедленно переходит в режим парковки. Рассоединяются только некоторые реле; большинство блоков управления переходят в режим сна.
Экономичный режим "Сон"
Экономичный режим "сон" предназначен для минимизации потребления мощности в период между производством и поставкой. Доступными функциями являются включение/выключение зажигания, стояночный тормоз и тахограф.
Примечание:
После поставки автомобиль можно принудительно установить в экономичный режим "сон" нажатием кнопки аварийной световой сигнализации в определенной последовательности.
Режим "Парковка"
Режим "Парковка" предназначен для поддержания потребления мощности на низком уровне. Режим "Парковка" означает, что автомобиль неподвижен и его функции неактивны. Всегда доступны функции отпирания, брелока и аварийной сигнализации.
Другими функциями эксплуатационной готовности являются:
- Стояночные огни доступны, только если они были включены, когда автомобиль вошел в режим парковки.
- Стояночный обогреватель и стояночный охладитель доступны только в случае автоматического включения режима парковки в связи с отсутствием действий.
- Несколько функций кузовостроителя и холодильника доступны в течение некоторого времени (каждая по отдельному таймеру) после входа автомобиля в режим парковки в связи с отсутствием действий.
Режим "Жилье"
В режиме жилья автомобиль неподвижен, и двигатель выключен. Режим "Жилье" обычно используется, когда водитель делает перерыв или спит в автомобиле. Доступными функциями являются замки, внутреннее освещение, холодильник, аудиосистема, функции, обеспечивающие комфорт и отдых.
Режим "Вспомогательные устройства"
В режиме вспомогательных устройств водитель обычно находится в автомобиле и готовится к троганию. Все подсети, кроме подсети двигателя, могут, но не обязательно должны, быть активны. Доступными функциями являются климат-контрол, стеклоподъемники, стеклоочистители, регулировка зеркал и кофеварка. Все функции, доступные в режиме жилья, доступны и в режиме вспомогательных устройств.
Режим "Прогрев"
В режиме прогрева активна подсеть двигателя, но двигатель не работает. Доступными являются все функции, кроме тех, которым требуется работающий двигатель.
Режим "Пуск"
В режиме пуска приоритет имеют все функции, необходимые для пуска двигателя. Некоторые потребители, которые не являются важными для пуска двигателя, отсоединяется на короткий период.
Режим "Работа"
Двигатель работает. Не все функции доступны в режиме работы, например, кофеварка.
Функции регистрации данных автомобиля осуществляют сбор и хранение данных автомобиля в VMCU, ECM, TECU, ACM.
Примечание:
Эти данные используются и могут быть извлечены только изготовителем и авторизованными станциями техобслуживания с помощью диагностического прибора (VolvoTechTool) или телематических средств. Эти данные используются для разработки и повышения качества продукции.
К функциям регистрации относятся:
Системное время
Системное времяотслеживает внутреннее время системы и включает в себя:
- UTC (Всемирное координированное время)
- Местное время (системное время + сдвиг).
Оно также предоставляет таймеры для различных компонентов и функций, например, климат-контроля и холодильника.
Чтобы разделить две аналогичные функции, функция часов взаимодействует с системным временем, но является отдельной функцией. Часы управляют функциями местного времени и/или даты, а также связанными с таймерами сигнализациями и напоминаниями. Доступ к системному времени предоставляется только на авторизованной станции техобслуживания, тогда как часы может устанавливать водитель с помощью панелей управления в автомобиле.
Сеть кузовостроителя
Сеть кузовостроителя состоит из блоков BBM (Модуль изготовителя кузова), BBEC (Электрический центр изготовителя кузова) и BBI (интерфейс кузовостроителя). Для функций кузовостроителя выделено несколько переключателей - два жестко связанных и четыре многофункциональных. Некоторыми функциями можно управлять при помощи беспроводного пульта дистанционного управления.
Большинство функций пульта дистанционного управления обычно используются извне автомобиля, когда автомобиль неподвижен, при остановленном или работающем двигателе. Некоторые функции можно использовать при движении на малой скорости.
- Модуль кузовостроителя.
- Электрический центр кузовостроителя.
- Интерфейс кузовостроителя.
Диагностика
Техник-ремонтник подключает ПК и с помощью диагностического прибора (VolvoTechTool) извлекает данные номера шасси, конфигурации автомобиля и всех DTC. Диагностический прибор также используется для выполнения обновлений программного обеспечения, настроек и калибровки.
Программное обеспечение диагностики обеспечивает пошаговое руководство поиском и устранением неисправностей. На иллюстрации показаны примеры экранов программного обеспечения диагностического прибора. Техник-ремонтник получает полный обзор состояния автомобиля и вех его функций, а также всех кодов DTC, поддерживаемых программным обеспечением.
Диагностический разъем
Диагностический разъем DIA-1
Диагностический разъем находится с нижней стороны приборной панели в кабине со стороны водителя. Когда дверь водителя открыта, разъем можно достать снаружи кабины. Техник подключается к диагностическому разъему для взаимодействия с электронной системой автомобиля.
Технические термины и сокращения
| Сокращение/термин | Пояснение |
| CAN | Controller Area Network (Локальная контроллерная сеть) |
| DTC | Diagnostic Trouble Code (Диагностический код неисправности) |
| ECU | Electronic Control Unit (Электронный блок управления) |
| Ethernet | Технология локальных компьютерных сетей |
| FAS | Front Axle Steering (Рулевое управление переднего моста) |
| FTP | File Transfer Protocol (Протокол передачи файлов) |
| GD | Guided Diagnostics (Пошаговая диагностика) |
| I/O | Input/Output (Ввод-вывод) |
| LAN | Local Area Network (Локальнаясеть) |
| LIN | Local Interconnect Network (низкоскоростная локальная сеть) |
| LKS | Lane Keeping Support (Контроль полосы движения) |
| Ведущий/ведомый | Принцип передачи данных, когда один из блоков управления управляет работой одного или нескольких устройств. |
| NOx | Датчик оксидов азота |
| OBD | On-Board Diagnostics (Встроенная диагностика) |
| PGAS | Power Generationand Storage(Генерация и хранение электроэнергии) |
| RKE | Remote Keyless System (Система дистанционного бесключевого доступа) |
| SWDL | Software Download Layer (Уровень загрузки программного обеспечения) |
| TIS | Transport Information System (Система информирования о дорожной обстановке) |
| Топология | Конфигурация связей между электронными компонентами. |
| VPT | Volvo Powertrain |
| RAS | Рулевое управление задней осью |
| SAE | Societyof Automotive Engineers (Американское общество автомобильных инженеров) |
Номера проводов
Провода маркируются четырехцифровыми номерами. Первая цифра указывает семейство, к которому относится провод. Исключением являются провода массы, которые маркируются только цифрой 1, если они не относятся, например, к датчику, заземленному на блоке управления; в последнем случае они также маркируются четырехцифровым номером, как указано выше.
Читайте также: