
Распиновка gps модуля для видеорегистратора
Обновлено: 06.05.2024
Однажды у меня возник интерес к GPS, а еще чуть раньше — к платформе Arduino. Поэтому со Sparkfun были заказаны, с разницей в пару дней, Arduino Duemilanove, GPS Shield и GPS приемник EM-406A.
Заказ пришел и частично лежал на полке, а недавно дошли руки до этого комплекта…
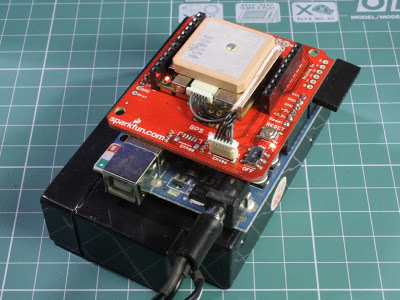
Собранный GPS Shield, подключенный к Arduino
Аппаратная часть
- Arduino Duemilanove
- GPS Shield
- GPS приемник EM-406A
- LCD WH-0802A
Распиновка GPS модуля EM-406A

При наличии щилда распиновка, по большому счету, не так важна — нужно просто вставить два разъема. Если щилд отсутствует, то нужно подключить выводы GND к GND, Rx — к digital pin 2, Tx — к digital pin 3, VCC — к POWER 5V. Внимание, серый провод не 1, а 6й!
- индикатор горит постоянно — идет поиск спутников и определение координат
- индикатор моргает — координаты установлены, идет их передача
- индикатор не горит, питание на шилд подано — плохой контакт в разъемах или модуль переключился в бинарный SiRF протокол
Переключатель UART/DLINE
Подключение знакосинтезирующего ЖК индикатора
Я не покупал отдельный shield под экран и подключал уже имеющийся индикатор — WH-0802A в 4х битном режиме. В принципе, так можно подключить любой другой знакосинтезирующий индикатор. Для этого нужно найти в даташите распиновку разъема и подключить линии RS, E, D4, D5, D6, D7 к любым цифровым pin'ам (кроме 0…3) и не забыть сконфигурировать куда подключены эти линии в коде, Vss, R/W — к GND, Vdd — к 5V. Вывод Vo (настройка контрастности) нужно подключить к потенциометру, включенному между GND и 5V, но я просто подключил к GND — полученная контрастность меня устроила.
Назначение выводов индикатора WH-0802A

Мой вариант подключения индикатора к Arduino
- RS — pin 13
- E — pin 12
- D4 — pin 11
- D5 — pin 10
- D6 — pin 9
- D7 — pin 8
- Vss, R/W, Vo — GND
- Vdd — 5V
Программная часть
Для работы с GPS потребуются две библиотеки TinyGPS и NewSoftSerial. Библиотеки распаковываются в каталог libraries.
После включения GPS модуля и заливки скетча нужно подождать как минимум 42 секунды (время холодного старта) для того чтобы модуль определил свое местоположение и начал выдавать валидные координаты. Когда модуль перейдет в рабочий режим он начнет моргать светодиодом. У меня на рабочем столе модуль не всегда может найти спутники — приходится переносить его на окно.
Работающий модуль с подключенным дисплеем и полученными координатами

Справа к дисплею подключён источник питания для подсветки.
После определения спутников на дисплее появляются координаты и обновляются раз в секунду.
В итоге получен опыт работы и база для дальнейшего освоения GPS.

Сегодня установка видеорегистратора в автомобиль стала привычным делом. При этом автомобилистам уже недостаточно просто фиксировать обстановку вокруг машины, теперь от регистратора требуют всё новых и новых возможностей. Одной из наиболее популярных является наличие GPS модуля, задача которого получать данные со спутников и записывать их в специальный файл. Таким образом, регистратор с gps дает возможность определить координаты авто в определенный момент времени и его скорость, связав эти данные с маршрутом движения машины.
Чтобы такое устройство было максимально функционально, следует придерживаться определенных правил при его установке:
- Первое, о чем следует подумать – это безопасность. Не стоит забывать о том, что в современных автомобилях в торпедах устанавливаются подушки безопасности, поэтому идея крепления регистратора внизу изначально неправильная. Кроме того, устройство будет попадать под потоки воздуха, обогревающие стекло, и с одной стороны мешать им, с другой – перегреваться.
- Чтобы видеорегистратор охватывал максимальную часть дороги, следует ознакомиться с его техническими характеристиками и делать выводы на основании этой информации. В частности следует учесть его угол обзора и выбрать такое положение, чтобы в кадр попадали оба угла капота и все, что происходит перед бампером. Таким образом, видеорегистратор следует поднять повыше.
- Однако устанавливать устройство прямо под крышей также нецелесообразно - провод питания придется тянуть на самый верх, что не очень удобно.
- Отдельно обратите внимание на то, чтобы камера не мешала датчикам дождя и света.
- Также следует учесть тот факт, что иногда атермальные лобовые стекла обрезают радио и электромагнитные сигналы. Поэтому желательно, чтобы GPS-модуль находился ниже полосы, на верхнем крае лобового стекла, защищающей водителя от солнечных лучей.
Резюмируя сказанное выше, можно сделать вывод, что видеорегистратор для автомобиля с GPS-модулем оптимально разместить на пятачке вокруг зеркала заднего вида или за ним.

Давно хотел пообщаться с космосом и наконец решил прикупить соответствующее железо. После вдумчивого поиска выбрал EB-500. Почему именно его? Большое число каналов (66), дешевый (500р), можно легко купить, практически не нужна внешняя обвязка и вполне паябельный корпус.
Всю статью разделю на 2 части: железную, с описанием самого модуля и платы и софтовую, с описанием зачем нам этот модуль вообще нужен.
Железо

Есть 2 типа модуля EB-500 и EB-500L. Отличаются они тем, что в EB-500L отсутствует LNA (Low Noise Amplifiers) в результате чего этот модуль может работать только с активными антеннами.
Схема модуля взятая из его даташита:
Как видно для работы девайса достаточно всего 5 конденсаторов.На вход VIN_3V3 (13) подается напряжение питания от 3.0 до 4.2В. Светодиод служит для индикации фиксации положения. При поиске он горит, а после получения координат начинает мигать раз в секунду. Последовательные порты 0 и 1 равнозначны, можно использовать любой. На выходе PPS (3), после фиксации положения, появляются положительные импульсы с F=1Гц. На вход V_RTC_3V3 (12) подается резервное питание для ускорения теплого старта. Можно соединить его с ногой питания.
Внимание! Без подачи напряжения на этот вывод модуль не запустится!
Из этой схемы получилась такая плата:
Для тестирования сей агрегат был подключен к компу через max232n, по самой типовой и стандартнейшей схеме.
В качестве антенны использовалась активная антенна ANT-380. Тут я ступил и взял антенну с разъемом MCX-M, для которого задолбался искать ответный разъем. Да и качество фиксации разъемов осталось довольно посредственным. Лучше было брать с разъемом SMA, с закручивающимся креплением.
После выкидывания антенны на подоконник первого этажа и первого включения, поиск спутников занял минут 20. При последующих запусках спутники находились не более минуты. Так что не экономим на батарейках, тем более потребление от нее всего 1.5uA.
Тут лежит файл проекта платы для diptrace 2.0. Размер 16.92кБ. В архиве схема, плата и компонент EB-500.
Антенны
Софт
Настройка модуля
Теперь о не приятном — все настройки хранятся в RAM и сбрасываются при отключении основного и резервного питания. Так что надо делать инициализацию при каждом включении. Гораздо большая неприятность — в конце команды должна быть контрольная сумма. Хорошо, что создавать их на лету скорее всего не понадобится, а один раз ее можно посчитать и через отладчик, например следующим образом:
В этой статье я расскажу про подключение GPS приемника к микроконтроллеру, на примере модуля u-blox GY-NEO6MV2. Приемник представляет из себя небольшую плату на которой расположены модуль NEO-6M-0-001, стабилизатор напряжения 3.3В, EEPROM память, аккумулятор и светодиод. Модуль продается вместе с активной антенной квадратной формы. Как и все GPS приемники, для передачи данных, модуль использует широко распространенный интерфейс UART, что облегчает его сопряжение с микроконтроллером.
Модуль можно приобрести здесь , есть более дешевый вариант собранный на красной плате с маленькой антенной, можно заказать тут .
RMC – минимальная рекомендуемая навигационная информация, содержит информацию о времени, дате, координатах местоположения, скорости и направлении курса.
| $GPRMC,170840.00,A,5509.68339,N,06125.49498,E,0.204,,311015. A*7D | |
| 170840.00 | Время UTC: 17ч. 08м. 40.00 сек. |
| A | Статус достоверности: A – достоверные данные, V – недостоверные данные |
| 5509.68339 | Широта: 55 градусов, 09.68339 минут |
| N | N – северная, S – южная |
| 06125.49498 | Долгота: 061 градусов, 25.49498 минут |
| E | E – восточная, W – западная |
| 0.204 | Горизонтальная скорость (узлов в час) |
| – | Направление курса относительно истинного севера (градусы) |
| 311015 | Дата: 31 октября 2015 года |
| – | Магнитное склонение (градусы) |
| – | Направление склонения: E – восточное, W – западное |
| A | Режим: A – автономный, D – дифференциальный, E – аппроксимация, N – недостоверные данные |
| *7D | Контрольная сумма |
VTG – текущее направление курса и скорость относительно Земли.
| $GPVTG,,T,,M,0.204,N,0.378,K,A*29 | |
| – | Направление курса (градусы) |
| T | Курс относительно истинного севера |
| – | Направление курса (градусы) |
| M | Курс относительно магнитного севера |
| 0.204 | Горизонтальная скорость |
| N | Единица измерения скорости (узлов в час) |
| 0.378 | Горизонтальная скорость |
| K | Единица измерения скорости (километров в час) |
| A | Неизвестный параметр |
| *29 | Контрольная сумма |
GGA – зафиксированные данные глобальной системы позиционирования, содержит информацию о времени, координатах местоположения, высоте, статусе определения координат, количестве использованных спутников.
| $GPGGA,170840.00,5509.68339,N,06125.49498,E,1,07,2.41,186.2,M,-13.5,M,,*77 | |
| 170840.00 | Время UTC: 17ч. 08м. 40.00 сек. |
| 5509.68339 | Широта: 55 градусов, 09.68339 минут |
| N | N – северная, S – южная |
| 06125.49498 | Долгота: 061 градусов, 25.49498 минут |
| E | E – восточная, W – западная |
| 1 | Статус определения координат: 0 – позиция не определена, 1 – позиция определена, 2- позиция определена с повышенной точностью (DGPS) |
| 07 | Количество использованных спутников |
| 2.41 | Снижение точности в горизонтальной плоскости (HDOP) |
| 186.2 | Высота над уровнем моря |
| M | Единица измерения высоты (метры) |
| -13.5 | Геоидальное различие — различие между земным эллипсоидом WGS-84 и уровнем моря (геоидом) |
| M | Единица измерения геоидального различия (метры) |
| – | Время с момента последнего обновления DGPS (секунды), 0 – DGPS не используется |
| *77 | Контрольная сумма |
GSA – Уровень точности определения координат и активные спутники, содержит информацию о режиме работы, спутниках, снижении точности в различных плоскостях.
| $GPGSA,A,3,06,29,23,26,02,09,31. 3.48,2.41,2.51*0D | |
| A | Режим 1: М – ручной 2D или 3D, A – автоматический 2D-разрешено переключение 2D/3D |
| 3 | Режим 2: 1 – позиция не определена, 2 – 2D позиция определена, высота не определена, 3 – 3D позиция и высота определена |
| 06 | Идентификатор 1-го спутника использованного для определения координат |
| 29 | Идентификатор 2-го спутника использованного для определения координат |
| …… | |
| – | Идентификатор 12-го спутника использованного для определения координат |
| 3.48 | Снижение точности по местоположению (PDOP) |
| 2.41 | Снижение точности в горизонтальной плоскости (HDOP) |
| 2.51 | Снижение точности в вертикальной плоскости (VDOP) |
| *0D | Контрольная сумма |
GSV – Информация о видимых спутниках, содержит число видимых спутников, их идентификаторы, высота, азимут, уровень сигнала.
GLL – географическая позиция – широта/долгота, содержит информацию о времени, координатах местоположения.
| $GPGLL,5509.68339,N,06125.49498,E,170840.00,A,A*65 | |
| 5509.68339 | Широта: 55 градусов, 09.68339 минут |
| N | N – северная, S – южная |
| 06125.49498 | Долгота: 061 градусов, 25.49498 минут |
| E | E – восточная, W – западная |
| 170840.00 | Время UTC: 17ч. 08м. 40.00 сек. |
| A | Статус достоверности: A – достоверные данные, V – недостоверные данные |
| *65 | Контрольная сумма |
Читайте также: