
Что такое сервопривод в автомобиле тойота
Обновлено: 20.05.2024
Что такое сервопривод, управление сервоприводом
Сервоприводом (англ. servo) называется такой привод, точное управление которым осуществляется через отрицательную обратную связь, и позволяет таким образом добиться требуемых параметров движения рабочего органа.
Механизмы этого типа имеют датчик, отслеживающий конкретный параметр, например скорость, положение или усилие, а также блок управления (механические тяги или электронную схему), задача которого — поддерживать в автоматическом режиме необходимый параметр в процессе работы устройства, в зависимости от сигнала с датчика в каждый момент времени.
Исходное значение рабочего параметра задается посредством управления, например ручкой потенциометра или при помощи другой внешней системы, куда вводится численное значение. Так, сервопривод автоматически исполняет поставленную задачу, - опираясь на сигнал с датчика, он точно подстраивает заданный параметр, и поддерживает его устойчиво на исполнительном органе.

Многие усилители и регуляторы с отрицательной обратной связью могут быть отнесены к сервоприводам. Например, к сервоприводам относятся тормозная система и рулевое управление в автомобилях, где усилитель ручного привода обязательно имеет отрицательную обратную связь по положению.
Основные компоненты сервопривода:
В качестве привода может использоваться например пневмоцилиндр со штоком или электродвигатель с редуктором. Датчиком обратной связи может быть энкодер (датчик угла поворота) или, например, датчик Холла. Блок управления — индивидуальный инвертор, преобразователь частоты, сервоусилитель (англ. Servodrive). В блок управления может сразу входить и датчик управляющего сигнала (конвертер, вход, датчик воздействия).
В самом простом виде блок управления для электрического сервопривода строится на базе схемы сравнения значений сигналов задаваемого и сигнала, идущего с датчика обратной связи, по результатам которого на электродвигатель подается напряжение соответствующей полярности.
Если требуется плавный разгон или плавное торможение, с целью избежать динамических перегрузок электродвигателя, то реализуют более сложные схемы управления на микропроцессорах, способные позиционировать рабочий орган более точно. Так к примеру устроен привод позиционирования головок в жестких дисках.
Точное управление группами или одиночными сервоприводами достигается применением контроллеров ЧПУ, которые, кстати, могут быть построены на программируемых логических контроллерах. Сервоприводы на основе таких контроллеров достигают по мощности 15 кВт, и могут развивать крутящий момент до 50 Нм.
Сервоприводы вращательного движения бывают синхронными, с возможностью исключительно точного задания скорости вращения, угла поворота и ускорения, и асинхронными, в которых скорость очень точно поддерживается даже на предельно низких оборотах.
Синхронные сервоприводы способны весьма быстро разгоняться до номинальных оборотов. Также распространены круглые и плоские сервоприводы линейного движения, позволяющие достигать ускорений вплоть до 70 м/с?.
Принципиально сервоприводы подразделяются на электрогидромеханические и электромеханические. У первых движение порождается системой поршень-цилиндр, и быстродействие получается очень высоким. Вторые используют просто электромотор с редуктором, однако быстродействие получается ниже на порядок.

Область применения сервоприводов сегодня весьма широка, благодаря возможности исключительно точного позиционирования рабочего органа.
Здесь и механические задвижки, и клапаны, и рабочие органы различных инструментов и станков, особенно с ЧПУ, включая автоматы для заводского изготовления печатных плат, и различные промышленные роботы, и многие другие точные приборы. Очень популярны высокоскоростные сервоприводы в среде авиамоделистов. Конкретно у сервомоторов примечательна характерная равномерность движения и эффективность в плане энергопотребления.
Изначально в качестве приводов сервомоторов применялись моторы трехполюсные коллекторные, где ротор содержал обмотки, а статор — постоянные магниты. Мало того, имелся коллекторно-щеточный узел. Позже количество обмоток возросло до пяти, и крутящий момент стал больше, а разгон — быстрее.
Следующая стадия совершенствования — обмотки разместили снаружи магнитов, так уменьшился вес ротора, и сократилось время разгона, однако возросла стоимость. В итоге был сделан ключевой шаг совершенствования - отказались от коллектора (в частности распространение получили приводные моторы с постоянными магнитами на роторе), и двигатель получился бесщеточным, еще более эффективным, поскольку ускорение, скорость, и крутящий момент стали теперь еще выше.
В последние годы весьма популярными становятся сервомоторы под управлением Arduino, благодаря чему открываются широкие возможности как для любительского авиа и роботостроения (квадрокоптеры и т.д.), так и для создания точных станков.
В большинстве своем обычные сервоприводы для работы использует три провода. Один из них для питания, второй сигнальный, третий — общий. На сигнальный провод подается управляющий сигнал, согласно которому требуется установить положение выходного вала. Положение вала определяется схемой с потенциометром.
Контроллер по сопротивлению и значению сигнала управления определяет, в каком направлении нужно осуществить вращение, чтобы вал пришел в требуемое положение. Выше напряжение снимаемое с потенциометра — больше крутящий момент.
Благодаря высокой энергоэффективности, возможности точного управления, и отличным рабочим характеристикам, именно сервоприводы на базе бесколлекторных моторов все чаще можно встретить как в игрушках, так и в бытовой технике (сверхмощные пылесосы с фильтрами HEPA) и в промышленном оборудовании.
Сервомотор представляет собой электродвигатель, работающий по принципу обратной связи. Вращение от ротора двигателя передается на управляющий механизм через редуктор, а обратная связь реализована с помощью управляющего блока, связанного с датчиком угла поворота.
Содержание статьи

- Что такое сервомотор и как он работает
- Что такое актуатор и как он работает
- Как понять, как работает машина
Сервомоторы используются в автомобильных системах для линейного и углового перемещения элементов, к точности положения которых выдвигаются повышенные требования. В основе работы сервопривода лежит корректировка работы электродвигателя для исполнения управляющего сигнала.
Назначение и состав
Если в качестве управляющего сигнала задается угол поворота выходного вала двигателя, выполняется его преобразование в подаваемое напряжение. Обратная связь выполняется благодаря датчику измерения одного из выходных параметров двигателя. Значение показаний датчика обрабатывается управляющим блоком, после чего осуществляется корректировка работы сервомотора.
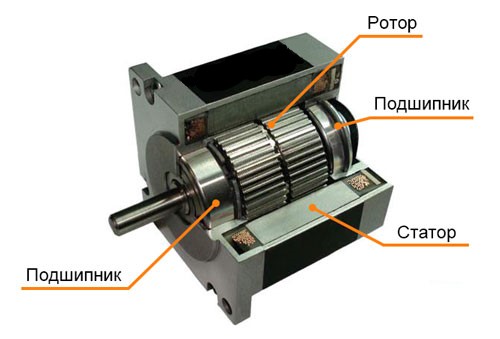
Конструктивно сервопривод представляет собой электромеханический узел, элементы которого размещены в едином корпусе. В состав сервопривода входит электродвигатель, редуктор, датчик и блок управления.
Основными характеристиками сервопривода является рабочее напряжение питания, частота вращения, крутящий момент, а также конструктивные решения и материалы, применяемые в конкретной модели.
Особенности конструкции и работы
В современных сервоприводах применяется 2 вида электромоторов – с сердечником и с полым ротором. Двигатели с сердечником имеют ротор с обмоткой, вокруг которой расположены магниты постоянного тока. Особенностями данного типа электромоторов является возникновение вибраций во время вращения маятника, что несколько снижает точность угловых перемещений. Двигатели с полым ротором лишены данного недостатка, но более дорогостоящи в связи с усложнением технологии изготовления.
Редукторы сервоприводов служат для снижения частоты вращения и увеличения крутящего момента на выводном валу. Редукторы сервоприводов в большинстве случаев состоят из цилиндрической зубчатой передачи, шестерни которой изготовлены из металла либо полимерных материалов. Металлические редукторы характеризуются большей стоимостью, но более прочны и долговечны.
В зависимости от требуемой точности работы в конструкции сервоприводов могут быть использованы пластиковые втулки либо шарикоподшипники для ориентации выходного вала относительно корпуса.
Также сервоприводы различают по типу блока управления. Существуют аналоговые и цифровые блоки управления сервоприводом. Цифровой блок позволяет обеспечивать более точное позиционирование рабочего органа сервопривода и большую скорость реакции.
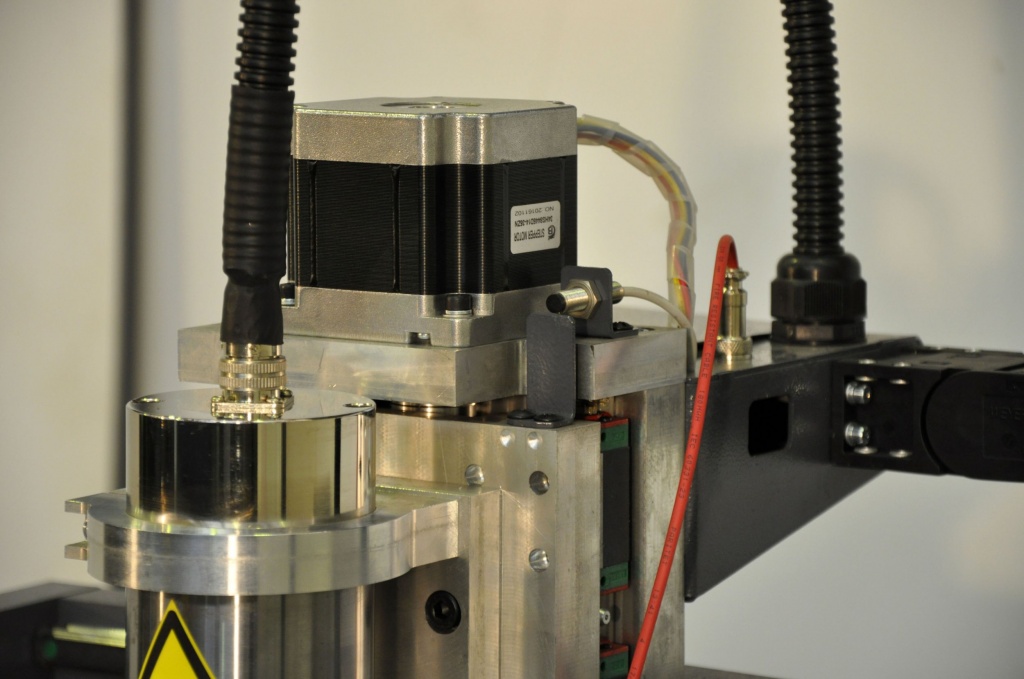
В качестве электропривода порталов и исполнительных узлов фрезерно-гравировальных станков с чпу и оборудования для плазменной резки с ЧПУ применяются шаговые двигатели и сервоприводы. Что лучше: шаговый двигатель или сервопривод, и в каких случаях применение того или иного электропривода экономически и технически оправданно, рассмотрим в данной статье.

Устройство шагового привода
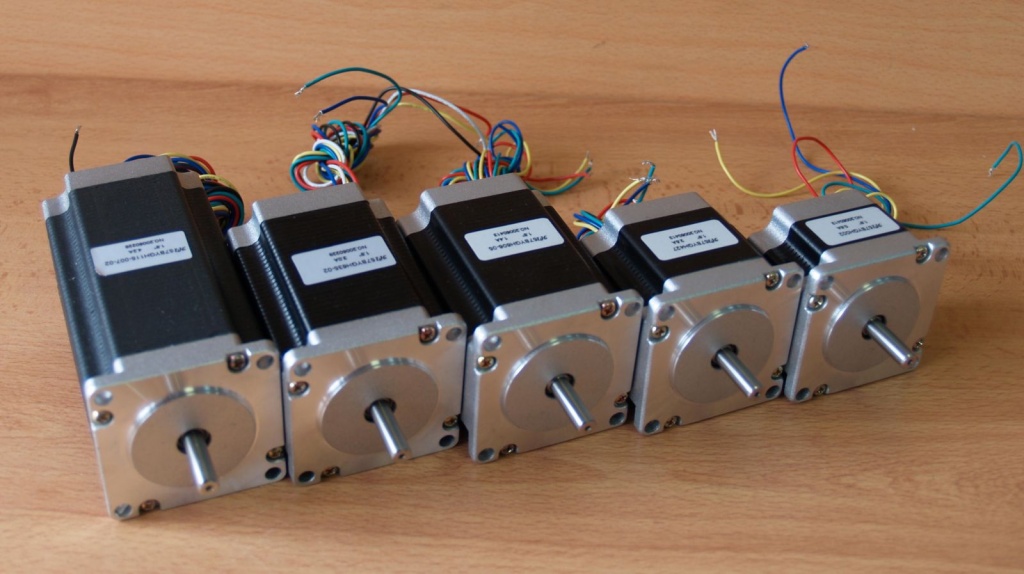
Шаговый привод состоит из синхронной электрической машины и управляющего контроллера. Последний обеспечивает подачу управляющих сигналов на обмотки двигателя и их попеременное включение в соответствии с заданной программой.
Шаговый двигатель — электрическая машина, преобразующая управляющие сигналы в перемещение вала на определенный угол и фиксацию его в заданном положении. Количество шагов таких электродвигателей составляет от 100 до 400, угол шага — от 0,9-3,6°.
Принцип работы шагового двигателя
Состоит это электромеханическое устройство из статора, где размещены катушки возбуждения, и вращающейся части с постоянными магнитами или обмотками. Такая конструкция ротора обеспечивает его фиксацию после отработки управляющей команды.
На статоре расположено несколько обмоток. При подаче напряжения на катушку, под воздействием магнитного поля ротор поворачивается на определенный угол в соответствии с пространственным положением обмотки. При ее обесточивании и подаче управляющего сигнала на другую катушку вращающаяся часть электродвигателя занимает другую позицию. Каждый поворот вала соответствует углу шага. При обратной последовательности подачи напряжения на катушки ротор вращается в противоположном направлении.
Для поворота ротора на меньший угол одновременно включаются 2 обмотки. Количество шагов ограничено и зависит от числа полюсов статора электромотора. Для обеспечения плавного вращения ротора на катушки статора подают разные токи, разность которых определяет положение ротора. Такой способ управления позволяет снизить дискретность и увеличить количество шагов до 400.
К числу недостатков шаговых двигателей можно отнести довольно низкую скорость, пропуск шагов при высокой (выше расчетной) нагрузке на валу, снижение момента при высокой частоте вращения и большое время разгона.
Устройство сервопривода
Сервопривод состоит из синхронного двигателя, датчика скорости и положения, а также управляющего контроллера. Основная разница между шаговым двигателем и сервоприводом состоит в наличии обратной связи по положению, скорости, моменту на валу ротора.
Электропривод такого типа построен на базе следящей схемы автоматического регулирования. При несоответствии скорости или другой величины контроллер будет подавать сигналы на отработку, пока требуемый параметр или положение вала не будет соответствовать заданному. В качестве датчика обратной связи используют абсолютные и относительные энкодеры различных типов и конструкций.

Принцип действия сервопривода
Управляющее устройство в соответствии с заданной программой подает напряжение на сервопривод, который соединен с порталом станка. Двигатель перемещает рабочий орган. При этом энкодер вырабатывает импульсы, поступающие на контроллер. Подсчет их числа осуществляет управляющее устройство. Количество импульсов пропорционально перемещению портала. При достижении рабочим органом заданного положения на электромотор перестает поступать напряжение. Портал фиксируется. Пока число импульсов, зафиксированных контроллером с датчика, не достигнет запрограммированной величины, двигатель будет осуществлять перемещение рабочего органа.
Шаговый сервопривод можно также настроить на поддержание постоянной частоты вращения вне зависимости от нагрузки или постоянного момента при разной скорости.
К достоинствам сервоприводов относятся точность позиционирования, динамика разгона и отсутствие снижения момента при высоких скоростях. Ограничивает применение сервопривода, как правило, достаточно большая стоимость.
Чем отличается сервопривод от шагового двигателя?
Современные шаговые электродвигатели обеспечивают перемещение рабочей части с точностью до 0,01 мм.
Отличие шагового двигателя от сервопривода заключается в пропуске шагов при высокой (выше расчетной) нагрузке, что значительно снижает качество обработки
Сервопривод для поворотного стола фрезерного станка или портала другого оборудования обеспечивает точность до 0,002 мкм.
Позиционирование по следящей схеме обеспечивает высокое качество обработки независимо от нагрузки
Максимальная скорость перемещения рабочих органов при использовании шагового электропривода — 25 м.
Время разгона — 120 об/мин за секунду
Сервопривод может перемещать портал со скоростью более 60 м/мин.
Время разгона составляет до 1000 об/мин за 0,2 секунды
Критерии выбора
Тип приводного двигателя для станков выбирают по следующим характеристикам:
По этому параметру сервоприводы значительно превосходят шаговые электромоторы. На станок с ЧПУ для обработки крупных деталей или заготовок из твердых материалов лучше уставить сервомотор, например, ESTUN 1000 Вт. Такой электропривод обеспечит более высокую скорость обработки твердых материалов. Для малогабаритного промышленного оборудования (например, настольного фрезерного станка) среднего класса точности, предназначенного для обработки мягких материалов, лучше выбрать шаговый двигатель.
Программирование и настройка сервопривода на станке с ЧПУ требуют высокой квалификации исполнителя. Такой привод намного дороже в обслуживании, соответственно расходы на его эксплуатацию будут выше.
Сервоприводы для станков с ЧПУ необходимы для высокоточной автоматизированной обработки. Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
Стоимость шагового двигателя значительно ниже цены сервопривода. При невысоком бюджете лучше предпочесть первый вариант.
По этому показателю сервомоторы предпочтительней. Работа шаговых электродвигателей сопровождается звуком, соответствующим частоте шагов на различных оборотах.
Таким образом, выбор сервопривода или шагового двигателя в качестве привода на фрезерно-гравировальный станок и оборудование для плазменной резки следует совершать, руководствуясь исключительно экономической и технической целесообразностью.

Для построения и развития успешного бизнеса, связанного с работой на фрезерном станке с ЧПУ, важно наличие значительных преимуществ перед конкурентами: например, высочайшего качества продукции и доступных цен. В данной статье расскажем, какие именно станки с ЧПУ подходят для малого бизнеса, какова стоимость того или иного оборудования, и насколько рентабелен такой вид деятельности.

Станки с ЧПУ значительно повлияли на сферу металлообработки и на работу с другими материалами. Программируемые установки обеспечиваюют повышенную точность фрезеровки, что приводит к значительному увеличению производительности труда. Процесс обработки заготовок проходит беспрерывно и в строгом соответствии заданной программе, а результат работы отличается высокой точностью. В статье мы рассмотрим важнейшие технические характеристики фрезерных станков с ЧПУ и основные сферы их применения.

Рабочий режущий инструмент станков с ЧПУ — это фреза. Конструктивно она является вращающейся деталью с заточенными зубьями. Фрезы для станков с ЧПУ по дереву производят из разных сплавов и делят на категории. Их выбор зависит от характеристик обрабатываемой поверхности, типа работы и степени твердости древесины. Правильно выбрать подходящий инструмент для программных станков поможет наша статья, которая познакомит вас с типами фрез и их назначением.
Шаговое устройство — бесщеточный двигатель с несколькими обмотками, функционирующий по синхронному принципу. Принцип работы шагового двигателя заключается в поочередной активации обмоток, которые обеспечивают вращение / остановку ротора.
Современные сверлильные станки с ЧПУ используются на производствах, на которых в больших объемах осуществляется обработка деталей всевозможного назначения, например, на мебельных фабриках. Сегодня производители предлагают покупателям модели сверлильных станков с ЧПУ во всем функциональном многообразии.
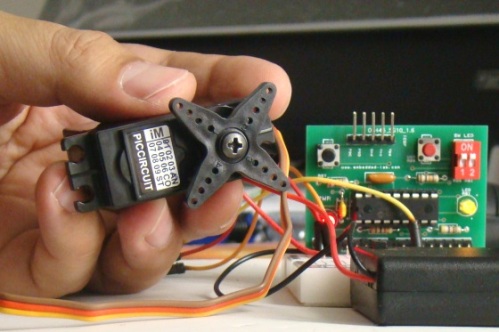
Сервопривод, он же сервомашинка, он же просто серво – простейший “модельный” актуатор, использовался в радиоуправляемых моделях ещё до появления Ардуино. Сервопривод поворачивает свой выходной вал в диапазоне ~180 градусов и обладает вполне приличным моментом для перемещения частей механизмов. В маленьком корпусе располагаются:
- Коллекторный моторчик
- Редуктор (пластиковый или металлический)
- Потенциометр обратной связи
- Контроллер (драйвер мотора, обратная связь, управление по интерфейсу PWM)
Серво комплектуется набором “качалок” и винтами для крепления

Характеристики 9-граммового сервопривода:
- Напряжение питания: 3.. 7.2V
- Крутящий момент:
- 1.2кг/см при 4.8V
- 1.6кг/см при 6.0V
Сервопривод управляется ШИМ сигналом, точнее длиной импульса: минимальная (0 градусов) и максимальная (~180 градусов) длина импульса колеблется в зависимости от модели и производителя сервопривода.
![]()
Подключение
- Коричневый: GND
- Красный: VCC
- Жёлтый: цифровой пин
Примечание: сервопривод потребляет довольно приличный ток (стартовый до 1А), поэтому рекомендуется питать его от внешнего источника. При питании от компьютера напряжение может просесть и МК перезагрузится, при высокой нагрузке (с 2 и больше приводов) может выгореть защитный диод на плате Arduino!
![]()
![]()
Библиотеки
Для управления сервоприводом можно использовать стандартную библиотеку Servo. Эта библиотека отбирает у микроконтроллера первый таймер, поэтому в некоторых случаях будет удобно использовать библиотеку SoftServo. Стандартная библиотека управляет сервоприводом очень резко, на максимальной скорости, поэтому для реальных применений лучше использовать библиотеку плавного движения серво – ServoSmooth.
Servo.h
Библиотека стандартная и идёт в комплекте с Arduino IDE. Подключаем и создаём объект сервопривода. При создании никакие аргументы не передаются:
Библиотека имеет следующие методы:
При “подключении” серво через attach(pin) диапазон длины импульса устанавливается стандартный: 544.. 2400 мкс (задан в библиотеке). Если есть желание настроить серво идеально, чтобы она работала на весь диапазон – нужно попробовать покрутить её через writeMicroseconds() в крайних значениях диапазона и найти минимум и максимум, при которых серво “упирается”.
Читайте также:


