
Через какой главный анализатор водитель получает основной поток информации при управлении тс
Обновлено: 05.07.2024
В результате изучения третьей главы обучающиеся должны:
- • средства связи в соответствии с их ролью в организации транспортного обслуживания;
- • применение систем и средств связи на транспорте в зависимости от их назначения, вида, характеристик;
- • основы передачи данных;
- • выбирать характеристики средств сбора данных о транспортных и логистических потоках;
- • выбирать характеристики локальных вычислительных сетей для организации коллективной работы с данными;
- • методами использования средств связи в соответствии с их ролью в организации транспортного обслуживания;
- • методами правильного применения информационных систем и средств связи на транспорте в зависимости от их назначения, вида, характеристик.
Мониторинг транспортных потоков
Идентификация транспортных потоков (ТП) является важнейшим компонентом любой современной системы управления движением. Благодаря использованию датчиков идентификации осуществляется обратная связь между центральным пунктом управления и дорожной сетью. Сущность обратной связи в контуре автоматического управления состоит в сборе информации о параметрах транспортных потоков.
Классификация датчиков, используемых для идентификации ТП, приведена на рис. 3.1.
По принципу действия датчики дорожного движения можно разделить на три группы: контактного типа, излучения, измерения параметров электромагнитных систем.
Датчики контактного типа (электромеханические, пневмоэлектриче- ские и т.п.) не получили распространения в системах управления дорожным движением из-за низкой надежности, зависимости от погодных условий и сложности обработки получаемых данных, так как они регистрируют не количество ПС, а количество осей.

Рис. 3.1. Классификация наиболее распространенных датчиков дорожного движения
Среди датчиков, устанавливаемых непосредственно в дорожном полотне, наибольшее распространение получил индуктивный датчик. Этому послужили такие факторы, как простота конструкции, надежность работы и более низкая стоимость относительно других типов датчиков.
Индуктивный датчик (рис. 3.2) представляет собой провод, расположенный в канавке дорожного полотна, который может иметь одну или больше петель различной формы. Провод для удобства контроля в эксплуатации через монтажный колодец соединен с контроллером, который передаст сигнал датчика в систему управления дорожным движением.

Рис. 3.2. Схема индуктивного датчика
На петлю подается переменный электрический ток частотой от 10 до 200 кГц, который создает электромагнитное поле. Когда транспортное средство проезжает по петле, шасси транспортного средства действует как проводник, сокращая индуктивность петли. Уменьшение индуктивности увеличивает резонансную частоту колебания в петле с ее номинального значения, и посылается импульс на электронную плату. Изменение частоты должно достигнуть некоторого предела, прежде чем контроллер интерпретирует это изменение как прохождение или наличие транспортного средства. Способность петли обнаруживать транспортные средства зависит от расстояния между проводом петли и металлическим шасси ПС.
Форма индуктивной петли должна быть выбрана на основе того, в каких условиях и какой объект необходимо обнаруживать. Чувствительность оптимальна, если петля не больше, чем обнаруживаемый объект. В противном случае на индуктивность петли будут влиять другие транспортные средства, проходящие вне зоны детектирования. Увеличение размера петли уменьшит изменение индуктивности, вызываемое проездом ПС. Например: если транспортное средство изменяет индуктивность на 1,0% при проезде над рамкой размером 1,8 х 1,8 м, то же самое транспортное средство изменит индуктивность на 0,5%, когда проедет по петле размером 1,8 х 3,6 м.
Прямоугольная форма петли наиболее подходит для того, чтобы обнаруживать легковые автомобили и грузовики. Петли, установленные под углом в 45° относительно дороги, идеально подходят для того, чтобы обнаруживать велосипеды. Петля в форме восьмерки устанавливается перед железнодорожными путями.
Индуктивные датчики по конструкции индуктивной петли можно разделить на следующие виды:
- • датчики с малой областью обнаружения — обычно состоят из единственной короткой петли средним размером 1,8 х 1,8 м, как правило, используются для обнаружения приближающихся к светофору автомобилей для управления работой светофора;
- • датчики с большой областью обнаружения — используются для фиксации присутствия ПС в зоне контроля (до 20 м), что позволяет реализовать алгоритм адаптивного управления на основе поиска разрыва в транспортном потоке.
В качестве такого вида датчиков используются длинные индуктивные петли, которые в последнее время для повышения надежности заменяются на несколько последовательных коротких петель, устанавливаемых вдоль дорожного полотна перед стоп-линией.
Для реализации широкой зоны обнаружения транспортных средств используют широкие индуктивные петли. Они применяется для продления зеленого сигнала в случае образования затора. Когда автомобили занимают всю детектируемую зону рамки, происходит продление горения зеленого сигнала на этом направлении. Если нет полного заполнения этой зоны (автомобили стоят не на всех полосах), то продления разрешающего сигнала не происходит.
С помощью индуктивных датчиков можно реализовать следующие управляющие воздействия по регулированию дорожного движения:
- • определить момент времени проезда ПС над определенным сечением дороги;
- • определить интенсивность транспортного потока и объема движения за промежуток времени любой длительности;
- • определить среднюю пространственную скорость потока на заданном участке дороги;
- • обнаружить затор на заданном участке дороги;
- • определить плотность потока на заданном участке дороги;
- • определить длину очереди автомобилей у перекрестка в заданном направлении.
Индуктивные датчики широко используются для предоставления приоритета в движении общественному транспорту. Для этого чаще всего используются различные устройства, которые формируют управляющий импульс, распознаваемый контроллером. После этого алгоритм управления вырабатывает решение о продлении горения, или включения, зеленого сигнала светофора. При наличии выделенной полосы для движения общественного транспорта могут использоваться две последовательно установленные индуктивные петли. Если контроллер получает сигнал одновременно от двух датчиков, то по полосе движется автобус, тогда как легковой автомобиль не может одновременно занять пространство над двумя датчиками.
Датчики, устанавливаемые над дорогой, отличаются более простой установкой, но дороже по сравнению с индуктивным детектором, и точность их показаний в большей степени зависит от погодных условий. Из этой группы датчиков акустические и инфракрасные чаще всего используются для фиксации присутствия транспортного средства.
В России наибольшую популярность получил радиолокационный детектор транспорта. Детектор может быть использован для работы в АСУ дорожным движением, для адаптивного управления движением транспорта, для контроля интенсивности движения и контроля на въездах/выез- дах скоростных дорог, для проведения транспортных обследований и автоматического обнаружения дорожно-транспортных происшествий и т.д. Принцип работы детектора основан на бесконтактном зондировании проезжей части дорожного полотна сигналом сверхвысокой частоты с линейной частотной модуляцией. Одновременно он может охватить несколько полос. Детектор монтируется на опорах освещения, опорах контактной сети, стенах зданий или других искусственных сооружениях, расположенных сбоку от проезжей части, устанавливается и настраивается без остановки движения транспорта. Детектор выполняет две основные функции.
- 1. Осуществляет регистрацию наличия движущихся транспортных средств в зонах контроля.
- 2. Ведет статистический учет динамических параметров транспортных потоков (общего количества ПС, прошедших зону контроля; занятости зоны контроля — как отношение времени, в течение которого зона контроля была занята ПС, ко времени статистического учета; средней скорости транспортного потока; количества длинномерных транспортных средств).
Данные сведения могут накапливаться во внутренней памяти детектора для последующего считывания или сразу передаваться в систему управления.
На рис. 3.3 — сам датчик со снятой крышкой, определение присутствия транспортных средств перед стоп-линией, принцип детектирования потока на многополосной дороге и реализация функции определения длины очереди транспортных средств перед светофорным постом.

Рис. 33. Радиолокационный детектор транспорта фирмы Wavetronix
Датчик легко настраивается с помощью программы с интуитивно понятным интерфейсом, что не требует специальной подготовки персонала.
С помощью программного обеспечения могут выполняются следующие задачи:
- • прием информации из БД детекторов транспорта;
- • определение стабильности показаний детекторов транспорта;
- • первичная статистическая обработка данных детекторов в целях идентификации и (или) отбраковки сомнительных данных;
- • статистическая обработка информации;
- • историко-статистическая обработка информации;
- • анализ информации.
Необходимость использования комбинированных детекторов вызвана тем, что опыт использования более простых устройств не позволяет с удовлетворительной точностью определять все параметры транспортных потоков. Комбинированный детектор использует следующие средства:
- • микроволновый радар, обеспечивающий измерение скорости движения каждой транспортной единицы;
- • ультразвуковой детектор, обеспечивающий классификацию транспортных средств на базе сканирования их профилей, а также индикацию стоящих автомобилей;
- • многоканальный инфракрасный детектор, обеспечивающий подсчет и уточнение интенсивности движения и занятость полосы движения (если активизирован режим экономии электроэнергии, этот детектор применяется также для включения и выключения радара).
Комбинированные детекторы устанавливаются над каждой полосой движения.
Наиболее перспективными датчиками считаются видеодетекторы. Система состоит из одной или нескольких видеокамер, сигналы от которых обрабатываются специальным быстродействующим ПО, которое позволяет устройству выполнять следующие функции:
- • определять общее количество прошедших транспортных средств по каждой полосе движения за заданный промежуток времени;
- • классифицировать прошедшие транспортные средства но типам мотоциклы, легковые автомобили, пикапы и малые грузовики (длиной менее 12 м), автобусы, большие грузовики (длиной более 12 м);
- • подсчитывать среднюю скорость движения по каждой полосе для разных типов ПС;
- • определять заполнение каждой дорожной полосы транспортными средствами (если транспортные средства в момент окончания заданного периода времени наблюдения не движутся или движутся со скоростью менее 5 км/ч, ситуация на дороге классифицируется как транспортный затор);
- • фиксировать расстояние между транспортными средствами на каждой полосе.
Одна видеокамера позволяет одновременно считывать данные от четырех до восьми полос движения. Существенным достоинствам видеодетекторов является возможность параллельного видеонаблюдения за зоной контроля. В то же время для сохранения качества изображения объектив видеокамеры необходимо периодически очищать. Для снижения эксплуатационных затрат выпускаются видеодетекторы с автоматической очисткой и обмывом защитного стекла объектива.
Аннотация научной статьи по компьютерным и информационным наукам, автор научной работы — Лашков И.Б.
Постановка проблемы: многие водители за рулем транспортного средства оказываются в состоянии усталости и при этом даже не подозревают о том, что находятся в таком состоянии. Отслеживание опасного поведения за рулем может помочь обратить внимание водителей на стиль своего вождения и связанные с этим риски, тем самым снизить процент неосторожного вождения, улучшить навыки безопасного поведения на дороге, таким образом уменьшив количество дорожно-транспортных происшествий на дорогах общего пользования. На сегодняшний день большую популярность приобретают системы автоматизированной поддержки водителей, призванные помочь им избежать дорожно-транспортных происшествий или смягчить их последствия, заранее предупреждая водителя об опасности звуковым или световым сигналом. Цель исследования: разработка концептуальной модели для анализа поведения водителя при управлении транспортным средством с использованием фронтальной камеры смартфона. Результаты: разработана концептуальная модель для распознавания небезопасного поведения водителя при помощи фронтальной камеры смартфона; представлен алгоритм определения признаков усталости и ослабленного внимания водителя; разработана онтологическая модель поведения водителя для определения опасных состояний при управлении транспортным средством; разработан прототип мобильного приложения для слежения за водителем при помощи фронтальной камеры смартфона и обнаружения признаков сонливости и ослабленного внимания в процессе управления им транспортным средством. Практическая значимость: разработанное мобильное приложение, задействующее алгоритм определения признаков сонливости и ослабленного внимания, позволяет распознавать небезопасное поведение водителя за рулем автомобиля и предупреждать о наступлении аварийной ситуации в процессе движения.
Похожие темы научных работ по компьютерным и информационным наукам , автор научной работы — Лашков И.Б.
Исследование и разработка подхода к построению интеллектуального мобильного сервиса для автоматизированной поддержки водителя транспортного средства
Обзор автомобильных систем оперативного контроля состояния водителя. Результаты собственных исследований
Driver’s Behavior Analysis with Smartphone Front Camera
Introduction: From time to time people drive while being tired or drowsy and, according to experts, many drivers fail to recognize that they are in a fatigue state. Monitoring dangerous driving behavior can help drivers pay attention to their driving style and the associated risks, thereby reducing the occurrences of careless driving and improving the safe driving skills. Advanced driver assistance systems are becoming popular nowadays. They can help drivers avoid road accidents, producing a warning signal by light or sound. Purpose: The goal was to develop a conceptual model for analyzing a driver’s behavior using a front-facing camera. Results: A conceptual model has been developed for recognizing a dangerous behavior of a driver using the front-facing camera of a smartphone. An algorithm for determining the visual cues of driver’s drowsiness and distraction is presented. An ontological model has been developed which detects the driver’s dangerous behavior. Processing the video stream from a front-facing camera and a variety of onboard smartphone sensors, the application attempts to recognize the driver’s behavior accurately, anticipating dangerous events caused by drowsiness or tiredness and producing an immediate alert with audible or visual signals. Practical relevance: The proposed mobile application can recognize unsafe behavior of a driver and give a warning about a possible emergency.
АНАЛИЗ ПОВЕДЕНИЯ ВОДИТЕЛЯ
ПРИ УПРАВЛЕНИИ ТРАНСПОРТНЫМ СРЕДСТВОМ
С ИСПОЛЬЗОВАНИЕМ ФРОНТАЛЬНОЙ КАМЕРЫ СМАРТФОНА
И. Б. Лашкова-6-1, аспирант
эСанкт-Петербургский национальный исследовательский университет информационных технологий,
механики и оптики, Санкт-Петербург, РФ
бСанкт-Петербургский институт информатики и автоматизации РАН, Санкт-Петербург, РФ
Постановка проблемы: многие водители за рулем транспортного средства оказываются в состоянии усталости и при этом даже не подозревают о том, что находятся в таком состоянии. Отслеживание опасного поведения за рулем может помочь обратить внимание водителей на стиль своего вождения и связанные с этим риски, тем самым снизить процент неосторожного вождения, улучшить навыки безопасного поведения на дороге, таким образом уменьшив количество дорожно-транспортных происшествий на дорогах общего пользования. На сегодняшний день большую популярность приобретают системы автоматизированной поддержки водителей, призванные помочь им избежать дорожно-транспортных происшествий или смягчить их последствия, заранее предупреждая водителя об опасности звуковым или световым сигналом. Цель исследования: разработка концептуальной модели для анализа поведения водителя при управлении транспортным средством с использованием фронтальной камеры смартфона. Результаты: разработана концептуальная модель для распознавания небезопасного поведения водителя при помощи фронтальной камеры смартфона; представлен алгоритм определения признаков усталости и ослабленного внимания водителя; разработана онтологическая модель поведения водителя для определения опасных состояний при управлении транспортным средством; разработан прототип мобильного приложения для слежения за водителем при помощи фронтальной камеры смартфона и обнаружения признаков сонливости и ослабленного внимания в процессе управления им транспортным средством. Практическая значимость: разработанное мобильное приложение, задействующее алгоритм определения признаков сонливости и ослабленного внимания, позволяет распознавать небезопасное поведение водителя за рулем автомобиля и предупреждать о наступлении аварийной ситуации в процессе движения.
Ключевые слова — современные системы содействия водителю, транспортные системы, онтологии.
Количество несчастных случаев, вызванных засыпанием водителя за рулем транспортного средства (ТС), с каждым годом уносит все больше жизней и приводит к травматизму среди населения как в России, так и в мире. Вождение в состоянии ослабленного внимания настолько же опасно, как и вождение в состоянии алкогольного опьянения, о чем свидетельствует анализ числа смертей и травм, полученных при вождении. Заснул ли водитель за рулем, или же у него замедлилась скорость реакции — все это в равной мере может привести к опасным последствиям.
На сегодняшний день безопасность на дороге определяется не только техническим состоянием ТС, дорожными условиями и соблюдением правил дорожного движения, но также навыками, физическим состоянием, способностью концентрироваться и соблюдением мер безопасности водителями.
В целях повышения уровня безопасности на дорогах мировыми производителями легковых и
1 Научный руководитель — кандидат технических наук, старший научный сотрудник Санкт-Петербургского института информатики и автоматизации РАН А. М. Кашевник.
грузовых автомобилей разрабатываются и встраиваются в автомобили современные системы содействия водителю (СССВ). Данные системы призваны помочь водителям предотвратить дорожно-транспортное происшествие (ДТП) или смягчить его последствия. Согласно прогнозу McKinsey Global Institute [1], среднегодовые темпы роста рынка систем помощи водителю до 2020 г. могут составить более $ 11 млрд.
В настоящий момент проводится достаточно много исследований в области компьютерного зрения (например, 5). В СССВ невербальное выражение водителем ТС внутреннего состояния анализируется при помощи видеокамеры за счет наблюдения за его головой и лицом, которые предоставляют достаточно точные характеристики, по которым можно определить физиологические особенности водителя. Предупреждающие сигналы подаются такими системами для стимулирования бдительности водителя, а также для предупреждения его о необходимости своевременных действий в ситуациях, когда существует риск возникновения ДТП. Так, например, управление автомобилем требует от водителя полной сосредоточенности внимания, хорошей реакции и адекватного восприятия дорожной обстановки. Существует большое количество отвлекающих внимание водителя факторов, таких как теле-
■ Рис. 1. Общая схема СССВ
■ Fig. 1. General scheme of ADAS
Технологии, составляющие СССВ, можно условно разделить по виду контекста на те, которые осуществляют мониторинг окружающей обстановки (дорожной обстановки), и те, которые направлены на слежение за поведением водителя внутри кабины ТС. Под контекстом понимается любая информация, которая может быть использована для описания ситуации, в которой находится в определенный момент времени некоторый объект (водитель ТС). Упрощенная схема СССВ, интегрированной в автомобиль и использующей оба вида контекста, представлена на рис. 1.
Получая и используя показания с телеметрии ТС (встроенных в автомобиль видеокамер, радаров, лазеров, датчиков, сенсоров), СССВ осуществляет сбор информации о дорожной обстановке (контексте автомобиля) и наблюдение за поведением водителя внутри кабины ТС (контексте водителя). Непрерывно анализируя опасные ситуации в процессе движения, при наступлении аварийной ситуации данная система способна принять управление ТС на себя или же выработать рекомендации водителю, оповестив его о них через информационно-развлекательную систему ТС.
Основной целью статьи является разработка прототипа мобильного приложения для предот-
вращения ДТП, основанного на использовании контекста внутри кабины ТС с применением фронтальной камеры и сенсоров смартфона и разработанной онтологии водителя. В статье описана реализация мобильного приложения для смартфонов на базе платформы Android, задачей которого является отслеживание физического состояния водителя и предупреждение его о риске наступления аварийной ситуации.
Аналитический обзор решений в области СССВ
Автопроизводители все активнее встраивают передовые системы помощи водителю, помогающие избежать аварии или уменьшить ее последствия. Можно выделить следующие наиболее встречающиеся: система контроля слепых зон (Blind Spot Detection — BSD), система контроля рядности движения (Lane Departure Warning — LDW), система обнаружения пешеходов и велосипедистов (Pedestrian Collision Warning — PCW), функция распознавания дорожных знаков (Traffic Sign Recognition — TSR), функция предупреждения о переднем столкновении и смягчении неизбежной аварии (Forward Collision Warning — FCW), система шоссейного мониторинга и предупреждения (Headway Monitoring and Warning — HMW).
Все СССВ можно условно разделить по форме представления на две категории:
— внешние камеры, сенсоры, датчики, чипы и т. д. вместе с программными средствами, встраиваемые в автомобили на заводах-изготовителях или устанавливаемые в качестве дополнительного оборудования уже самим водителем;
— мобильные приложения, устанавливаемые водителем на смартфон из магазина приложений Google Play (магазин приложений, игр, книг, музыки и фильмов компании Google и других компаний) или App Store (магазин приложений, раздел онлайн-магазина iTunes Store компании Apple, предлагающий iOS-приложения).
В настоящее время существует достаточно большое количество производителей, разрабатывающих и интегрирующих интеллектуальные системы помощи водителю. Одной из ведущих компаний в области проектирования и разработки систем безопасности и помощи водителю является Mobileye (Израиль). Данная компания предоставляет интеллектуальную систему помощи водителю, встраиваемую в ТС некоторыми заводами-изготовителями. При этом существует возможность покупки водителем видеокамеры, устанавливаемой под лобовым стеклом автомобиля, с интегрированным программным обеспечением. Примерами опасных ситуаций, определяемых такой системой, являются: наезд на пешехода, несоблюдение дистанции до движущегося впереди ТС, непреднамеренный съезд с полосы движения, а также превышение разрешенной скорости движения на данном участке. Как можно заметить, в целях предотвращения ДТП СССВ осуществляют визуальную оценку окружающей обстановки вокруг автомобиля, а поведение водителя и обстановка внутри кабины не учитываются. Стоит также заметить, что на данный момент интегрируемые в ТС СССВ в основном доступны в виде дополнительной опции для автомобилей класса премиум и выше, а сама стоимость такого оборудования остается достаточно высокой.
Другой категорией СССВ являются мобильные приложения, представленные в основном на платформах iOS и Android и являющиеся пассивными системами содействия водителю.
Мобильное приложение использует встроенные в смартфон тыловую камеру, сенсоры и датчики для обнаружения впереди идущих автомобилей и предупреждения водителя в случае опасности. Такое приложение распознает объекты впереди водителя в реальном времени, вычисляет текущую скорость автомобиля, и при надвигающейся опасности система воспроизводит звуковое и визуальное предупреждение, уведомляя водителя о необходимости своевременной реакции для предотвращения ДТП. Существующие мобильные приложения сфокусированы на обработке изображений, получаемых из видеоряда тыловой камеры смартфона, направленной на слежение за дорожной обстановкой впереди автомобиля. Обрабатывая и анализируя изображения, мобильные приложения способны распознавать небезопасную дистанцию до впереди идущих ТС, съезд с выбранной полосы движения, дорожные знаки и т. п. Сравнение мобильных СССВ-приложений по набору технологий, часто встречающихся в подобных системах (LDW, FCW, CLC, LW, HWM, SLI/TSR, PCW), а также системах распознавания сонливости (Drowsiness Driving — DD) и ослабленного внимания (Inattentive Driving — ID) водителя представлено в табл. 1.
Несмотря на небольшие размеры современных смартфонов, в них встроено большое количество различных сенсоров и датчиков, среди которых к часто встречающимся можно отнести фронтальную и тыловую камеры, GPS, акселерометр (G-сенсор), гироскоп, микрофон. Сравнение мобильных СССВ-приложений по использованию доступных сенсоров смартфонов представлено в табл. 2.
Одним из наиболее популярных мобильных приложений среди СССВ, предназначенных для повышения безопасности вождения ТС, является мобильное приложение дополненной реальности iOnRoad, доступное на платформах iOS
■ Таблица 1. Сравнение мобильных СССВ-приложений по наличию функций
■ Table 1. Comparison of mobile ADAS application functions
Приложение Платформа Технология
iOS Android LDW FCW CLC LW HMW DD ID SLI/TSR PCW
Nexar — AI Dashcam - + + + + - - - - - -
■ Таблица 2. Сравнение мобильных СССВ-приложений по использованию встроенных камер и сенсоров смартфона
■ Table 2. Comparison of mobile ADAS applications by employing the built-in cameras and smartphone sensors
Фронтальная камера Тыловая камера GPS Акселерометр Гироскоп Микрофон
Nexar — AI Dashcam - + - + + +
с фронтальной камеры смартфона и используемых при выявлении опасных ситуаций. Данное приложение, опубликованное ранее в магазине приложений App Store, на текущий момент недоступно. Другим помощником водителя может служить мобильное приложение Driver Guard [9], осуществляющее слежение за обстановкой, помогая поддерживать безопасную дистанцию до впереди идущего ТС, и предупреждающее водителя о наступлении опасного состояния. Данное приложение доступно только на платформе Android. Приложение Nexar — AI Dashcam [10] доступно на платформах iOS и Android и работает как видеорегистратор, сохраняющий информацию о поездке в удаленном хранилище: время, координаты и скорость автомобиля и запись ДТП. Nexar ведет запись видеопотока одновременно с фронтальной и тыловой камер смартфона, сохраняет номерные знаки ТС, нарушающих правила дорожного движения, чтобы впоследствии при появлении нарушителя в зоне видимости камеры смартфона предупредить водителя при помощи текстовых и звуковых оповещений.
К сожалению, проанализированные приложения учитывают не весь спектр небезопасных дорожных ситуаций, с которыми может столкнуться водитель ТС. Рассмотренные мобильные приложения сфокусированы на анализе окружающей дорожной обстановки, не учитывая в полной мере контекст внутри кабины ТС. Существующие приложения не подстраиваются под конкретного водителя, не осуществляют дополнительную калибровку всей системы, пренебрегая прошлым опытом водителя, его поведением за рулем ТС и паттернами вождения при анализе небезопасного состояния водителя, тем самым уменьшается точность распознавания небезопасных ситуаций при работе систем помощи водителю.
Концептуальная модель предложенной СССВ
Концептуальная модель предложенной мобильной системы, реализующей функции СССВ, представлена на рис. 2. Модель состоит из трех основных компонентов: водителя, смартфона и облачного сервиса. Устанавливаемое на смартфон мобильное приложение задействует фронтальную камеру и сенсоры (GPS, акселерометр, гироскоп, магнетометр) телефона для получения изображений водителя и параметров поездки (скорости, ускорения, торможения, поворота налево/ направо и текущей геопозиции ТС). Для поиска и извлечения характеристик лица водителя (положения головы; доли времени, когда глаза закрыты — PERCLOS — PERcentage of eye CLOSure [11]; скорости моргания век; направления взгляда; зевоты) его исходное изображение, поступающее на вход модуля обработки изображений, обрабатывается методами компьютерного зрения. Используя онтологию водителя, характеристики его лица и показания сенсоров смартфона, модуль анализа выявляет опасные состояния и аварийные ситуации, в которые может попасть водитель ТС. На основе выявленной авариной ситуации и
контекста, в котором находятся водитель и ТС, модуль рекомендаций вырабатывает рекомендации, следование которым позволяет снизить вероятность наступления ДТП. Планировщик задач осуществляет распределение ресурсоемких, затратных по распознаванию объектов на изображении, вычислительных и сетевых задач, что позволяет воспользоваться возможностями многоядерных процессоров современных смартфонов, переключая потоки на исполнение.
Большое количество информации, получаемой и генерируемой в процессе работы с фронтальной камерой и многочисленными сенсорами смартфона, накапливается системой помощи водителю при отслеживании его поведения за рулем автомобиля. Хранение, управление, анализ и генерирование новых данных осуществляется при помощи технологической связи в виде локальной базы данных (БД), хранящейся в приложении на смартфоне водителя и облачном сервисе, доступном удаленно для каждого пользователя в любой момент времени. Локальная БД используется для хранения временных пользовательских данных и подготовки их в целях дальнейшей синхронизации, отправки в облачный сервис. Использование локальной БД может быть также оправдано в от-
2. Роль ощущений в правильном познании водителем свойств окружающих объектов.
3. Структурная схема организации службы безопасности движения на автотранспортном предприятии. Обязанности и права инженера (старшего инженера) по безопасности движения. Документация в отделе.
Мастерство включает в себя три непременные составляющие: навыки выполнения операций с органами управления, регулирование движения автомобиля (разгон, торможение, поворот в соответствии с поставленной задачей) и умение управлять, т.е. выбирать режим движения так, чтобы не возникали экстремальные ситуации, чтобы экологическое воздействие и затраты на эксплуатацию были минимальные.
Для достижения необходимого уровня мастерства нужны знания и практика вождения. Знание теории ускоряет приобретение практических навыков и умений. Отсутствие теоретических знаний становится причиной появления мифов, основанных на ошибочном распространении приемов управления, полезных в определенной ситуации, на все случаи жизни. Например, примером такого мифа являются мнимые опасности движения накатом – с разъединенной трансмиссией.
2. Роль ощущений в правильном познании водителем свойств окружающих объектов.
Информация к водителю поступает посредством ощущений – отражения в сознании водителя отдельных свойств предметов и явлений среды движения автомобиля, состояния автомобиля и водителя. Это процесс воздействия на органы чувств называется – раздражением.
Раздражитель воздействует на рецепторы (получатели информации), возникшее возбуждение по проводящим нервным путям передается в соответствующие отделы центральной нервной системы, в которых нервное возбуждение переходит в психическое явление – ощущение.
Нервно-физиологический аппарат получения ощущений называется – анализатором.
Получение информации из среды движения, среды в салоне автомобиля о состоянии основано на действии группы анализаторов, в числе которых: зрительный, слуховой, кожный, мышечно-суставный, статико-акселерационный.
К внутренним ощущениям относятся: бодрость или усталость, насыщение или голод, ощущение здоровья или болезненного состояния.
Рецепторы анализаторов этих ощущений водителя расположены во внутренних его органах.
Внутреннее ощущение проявляется как общее самочувствие и оказывает большое влияние на профессиональную надежность водителя.
Наибольшую часть информации водитель получает через зрительный анализатор. Через слуховой анализатор также поступает важная информация – звуковые сигналы других участников дорожного движения; шумы, позволяющие судить об исправности автомобиля и его систем. Благодаря тактильному анализатору водитель может на ощупь определить органы управления автомобиля. С помощью мышечно-суставного анализатора водитель способен без зрительного контроля находит необходимые органы управления и, плавно регулируя, изменяя их положение на необходимую величину.
Не менее важным является ощущение характера изменения усилия при перемещении органов управления.
Статико-акселерационный анализатор играет важную роль в определении штатности режима движения автомобиля; предотвращении потери устойчивости автомобиля при заносе, крене.
Чувствительность анализаторов изменяется в зависимости от внешних условий, таких как: степень освещенности, шум, вибрация, скорость автомобиля; внутреннего состояния водителя: утомление, страх, опьянение; и конечно же уровня профессионального мастерства.
При воздействии на водителя нескольких раздражителей одновременно проявляется следующая закономерность: слабые раздражители увеличивают чувствительность к другим раздражителям, а сильные уменьшают ее.
Рецепторы водителя испытывают воздействие большого числа источников информации. Одной из задач психической деятельности является отсечение ненужной и выделение полезной информации.
3. Структурная схема организации службы безопасности движения на автотранспортном предприятии. Обязанности и права инженера (старшего инженера) по безопасности движения. Документация в отделе.
В связи с введением обязательного страхования от несчастных случаев на производстве значительно повышаются требования соответствующих контролирующих органов к предприятиям по вопросам, относящимся к охране труда на производстве.
При этом особое внимание уделяется оборудованию кабинетов и уголков
охраны труда, а также кабинетов по безопасности дорожного движения на
предприятиях, имеющих в своем составе автотранспорт.
Одной из основных задач администрации и руководства предприятия, специалистов службы охраны труда является профилактика (предупреждение) несчастных случаев на производстве.
Если же, несмотря на все профилактические мероприятия, несчастный случай все же происходит, то тогда необходимо решать другой комплекс задач:
-оказание первой помощи пострадавшим;
-квалификация несчастного случая, его расследование;
-разработка мероприятий по их устранению;
-оформление и учет несчастного случая.
Любая неточность в этой работе может привести к весьма неприятным последствиям, как для пострадавших, так и для ответственных за обеспечение безопасности труда на производстве.
В связи с этим руководителям предприятий, лицам, ответственным за соблюдение норм и правил охраны труда, сотрудникам предприятий, необходимо знать, во-первых, что делать, чтобы несчастный случай на предприятии не произошел, и, во-вторых, что делать, если несчастный случай все-таки произошел.
Необходимо отметить, что комплекс мероприятий, относящихся к
профилактике (предупреждению) несчастных случаев на производстве
существенным образом зависит от характера данного конкретного производства, специфики его деятельности, используемых технологических процессов, оборудования и т.п.
В то же время комплекс мероприятий, которые необходимо проводить, если несчастный случай на производстве все таки произошел, почти не зависит от характера данного конкретного производства.
Кабинет безопасности движения является организационным учебно-
методическим центром пропаганды знаний. Содержанием работы кабинета
являются организация и проведение:
1. Обучения и инструктажа по безопасности движения на дорогах.
2. Семинаров, курсов и тематических занятий для рабочих и служащих,
профсоюзного актива; периодического инструктажа и проверки знаний
работников по вопросам безопасности движения.
пропагандирующих передовой опыт работы.
4. Тематических выставок, пропагандирующих опыт своего и родственных
предприятий по снижению травматизма.
5. Информационной работы по пропаганде достижений в области организации безопасности движения, применения новых материалов, процессов и других мероприятий, внедрение которых способствует безопасности движения.
6. Методической помощи цехам, производственным участкам (отделам,
лабораториям) в организации и работе стендов по безопасности движения.
Кабинет по безопасности движения рекомендуется создавать на предприятии со списочным количеством работников 100 человек и более.
На предприятии со списочным количеством работников до 300 человек кабинет по безопасности движения может быть совмещен с кабинетом для учебных занятий (техническим кабинетом).
Для оборудования кабинета должно быть выделено специальное помещение, площадь которого рекомендуется определять в зависимости от списочного количества работников:
-до 1000 человек — 24 кв. м;
-от 1001 до 3000 человек — 48 кв. м;
-от 3001 до 5000 человек — 72 кв. м;
-от 5001 до 10000 человек — 100 кв. м;
-от 10001 до 20000 человек — 150 кв. м;
-свыше 20000 человек — 200 кв. м.
Методический кабинет оборудуется по проекту, составленному с учетом специфики производства предприятия.
Непосредственную практическую работу методического кабинета должен организовывать инженер-методист, подчиненный руководителю службы охраны труда.
Кабинет должен быть оснащен в соответствии со стоящими перед ним задачами и иметь три следующих раздела: учебный, справочно-методический и информационно-выставочный.
Учебный раздел - должен быть наибольшим, как по занимаемой площади, так и по количеству используемых в нем материалов; укомплектован учебно-наглядными пособиями, отражающими специфику всех видов движения, а также учебным инвентарем и техническими средствами пропаганды (проекционной, звукозаписывающей и воспроизводящей аппаратурой, контрольно-обучающими машинами, тренажерами, контрольно-измерительными приборами).
Для дистанционного управления техническими средствами обучения необходимо установить на столе преподавателя пульт управления, который состоит из элементов управления техническими средствами обучения и информации (кинопроекционная установка, диапроекторы для демонстрации диапозитивов и диафильмов) и системы рационального затемнения кабинета.
Рекомендуется учебно-наглядные пособия систематизировать по тематике, сведя их в две группы — общую и специальную.
Пособия общей группы могут быть использованы, главным образом, при проведении вводного инструктажа, и тематика их должна быть согласована с программой инструктажа.
Пособия специальной группы должны отражать специфические условия работы производственных участков и требования, предъявляемые к организации и содержанию рабочих мест.
Справочно-методический раздел должен быть укомплектован нормативно-технической документацией по безопасности движения, учебными программами, методическими справочниками, директивными и другими пособиями, необходимыми для проведения обучения, инструктажа и консультаций работающих по вопросам трудового законодательства, техники безопасности и производственной санитарии.
Информационно-выставочный раздел должен быть укомплектован пособиями, оборудованием, экспонатами, действующими моделями, предназначенными для организации постоянных и временных передвижных выставок на территории предприятия.
Создание кабинета по безопасности движения должно осуществляться по определенному плану под руководством службы охраны труда предприятия.
Кабинет должен быть расположен по возможности рядом со службой охраны труда и состоять из 2 помещений: основного (учебного) и подсобного (препараторской).
Подсобное помещение рекомендуется площадью 12—15кв. м.
Естественное освещение кабинета должно быть равномерным и рассеянным и соответствовать требованиям СНиП 11-4-79 "Естественное и искусственное
освещение". Отношение площади окон к площади пола должно быть не менее 1:4.
Должностные обязанности инженера (старшего инженера) по безопасности движения.
На инженера по безопасности дорожного движения автотранспортного
предприятия возлагаются следующие должностные обязанности:
1.1. Консультирование по вопросам безопасности дорожного движения.
1.2. Контроль выхода транспортных средств на линию и работы
водителей на линии.
1.3. Обеспечение профессиональной надежности водителей.
1.4. Проведение обучения водителей.
1.5. Проведение инструктажей по безопасности дорожного движения.
1.6. Проведение проверок знаний по безопасности дорожного движения.
1.7. Обеспечение эксплуатации транспортных средств.
1.8. Проведение технических осмотров автотранспорта.
1.9. Ведение учетной документации в соответствии с требованиями
1.10. Планирование мероприятий, направленных на реализацию
требований правил дорожного движения, на устранение причин и условий
дорожно-транспортных происшествий, в которых участвовали транспортные
1.11. Проведение мероприятий по профилактике аварийности.
1.12. Оформление и анализ дорожно-транспортных происшествий.
1.13. Взаимодействие с органами ГИБДД по вопросам постановки на
учет и снятия с учета автотранспорта предприятия.
1.14. Осуществление учета сведений о проведении инструктажа по
безопасному дорожному движению.
2. Права работника.
Инженер по безопасности дорожного движения автотранспортного
предприятия имеет право:
2.1. На все предусмотренные законодательством социальные гарантии.
2.2. Требовать от руководства предприятия оказания содействия в
исполнении своих профессиональных обязанностей и осуществлении прав.
2.3. Знакомиться с проектами решений руководства предприятия,
касающимися его деятельности.
2.4. Запрашивать лично или по поручению непосредственного
руководителя документы, материалы, инструменты и т.п., необходимые для
выполнения своих должностных обязанностей.
2.5. Другие права, предусмотренные трудовым законодательством.
3. Ответственность работника
Инженер по безопасности дорожного движения автотранспортного
предприятия несет ответственность:
3.1. За обеспечение требований безопасности дорожного движения,
предусмотренных нормативными актами.
3.2. За неисполнение или ненадлежащее исполнение своих
должностных обязанностей, предусмотренных настоящей должностной
инструкцией, - в пределах, определенных действующим трудовым
3.3. За причинение материального ущерба работодателю - в пределах,
определенных действующим трудовым и гражданским законодательством РФ.
3.4. За правонарушения, совершенные в процессе осуществления своей
деятельности, - в пределах, определенных действующим административным,
уголовным, гражданским законодательством РФ.
Документация отдела по безопасности дорожного движения.
1. Журнал учета вводного и периодического инструктажа по безопасности дорожного движения.
2. Журнал учета предрейсового инструктажа водителей.
3. Журнал учета сезонного инструктажа водителей об особенностях проезда железнодорожных преездов.
4. Журнал учета специального инструктажа водителей.
5. Журнал учета дорожно – транспортных происшествий на предприятиях, в организациях и учреждениях.
Основные информационные системы автомобиля
По сбору и отражению сведений информационные системы автомобиля можно разделить на внутренние и внешние. Внутренние системы контролируют объективные показатели скорости, оборотов двигателя, состояния ответственных узлов машины. Для получения таких сведений используются приборы автомобиля и бортовой компьютер.
Приборная доска
Первым прибором, который появился на приборной доске автомобиля стали часы. Следом за хронометром (с 1901 г.) на щитке приборов начали монтировать спидометр, измеряющий скорость. Кстати, одна из первых моделей прибора была изобретена и запатентована Николой Тесла (1916 г.). Особое значение комбинация хронометра и одометра приобрела с введением ограничений на скорость автомобильного движения.

Одни из первых спидометров в музее Toyota
Следом за спидометром автоконструкторы оснастили приборную доску тахометром (изобретен в 1903 г., измеряет количество оборотов двигателя), приборами для измерения температуры охлаждающей жидкости двигателя, уровня горючего в топливном баке. Этот набор циферблатов традиционно используется и на современных приборных щитках.
Со временем на гоночных и элитных автомобилях стали устанавливать ряд дополнительных циферблатов, информирующих водителя о включении дальнего и ближнего света, расходе топлива, запасе хода. Пользоваться таким количеством циферблатов вряд ли было удобно обычному водителю.
С развитием электроники вся второстепенная информация перекочевала на дисплей бортового компьютера. Но традиционные круглые шкалы основного набора приборов привычны, удобны при быстром взгляде. Владельцы автомобилей с трудом принимают новшества в виде прямоугольных шкал и цифровых шрифтов электронных приборов.
Тем не менее, на приборном щитке прижились удобные подсвечиваемые значки разряда аккумулятора, работы указателей поворотов, включения габаритов, ближнего и дальнего света, индикация систем активной безопасности.
Функции бортового компьютера
Торговое выделение универсальных компьютеров, которые можно установить на отечественную машину, носит рекламный характер. Дополнительно установленный гаджет заведомо проигрывает стационарному борткомпьютеру по набору функций.

Современный бортовой компьютер
- скорости (реальной и средней);
- времени в пути;
- доступном расстоянии пробега при существующем запасе топлива;
- потреблении топлива (среднем или в реальный момент времени);
- температуре наружного воздуха.
В зависимости от количества датчиков, установленных автопроизводителем, функции сканирования борткомпьютера позволяют контролировать и архивировать коды ошибок и неисправности:
- ЭБУ двигателя;
- систем управления форсунками, впрыском;
- блоков управления автоматическими трансмиссиями;
- электронных ассистентов (ABS, ESP);
- аккумуляторной батареи и бортового электропитания;
- тормозной системы (через датчики износа тормозных колодок).
Мультимедийный карпьютер, связанный с интернетом, способен заменить целый ряд отдельных приборов:
- тюнеры радио, ТВ;
- музыкальный проигрыватель, не ограниченный форматом, накопителем дисков;
- GPS-навигатор;
- ноутбук или планшет с функциями приема электронной почты, поиском информации в Интернете, подключением компактных электронных носителей информации;
- мобильный телефон;
- радиостанцию, обеспечивающую постоянную радиосвязь с несколькими автомобильными или стационарными рациями.

Огромный дисплей совмещенного компьютера Tesla
На дорогие иномарки, как правило, устанавливают оба вида компьютеров (бортовой и мультимедийный). Автоконструкторы начали объединять две компьютерные системы в единое целое. Но ряд экспертов возражает против такого подхода, так как сбой одного из компонентов может полностью лишить автомобиль всех источников информации.
Стандартные источники внешней информации
Так как компьютеризация удорожает себестоимость автомобиля, бюджетные отечественные машины и недорогие иномарки используют стандартный набор мультимедиа, состоящий из автомагнитолы (с ресивером радио, проигрывателем CD или DVD – дисков) и акустической системы с несколькими динамиками.
Автомагнитолы, как многофункциональные устройства, пришли на смену автомобильным радиоприемникам, которые много лет были единственным источником внешней новостной и музыкальной информации для пассажиров машины в движении.
Расширенные функции современной автомагнитолы позволяют:
- управлять гаджетом с помощью кнопок на руле;
- подключать внешние накопители через порты AUX, USB;
- использовать несколько форматов воспроизведения музыки;
- подключать мобильный телефон или смартфон через адаптер Bluetooth;
- выводить на дисплей показания навигации, задней видеокамеры.

Стандартное мультимедиа автомобиля
Функции недорогой автомагнитолы можно расширить установкой дополнительных устройств — навигаторов, видеорегистраторов с определителем радаров, CD-чейнджеров.
Контроль за дорожной обстановкой и парковкой
Простые задние парктроники, определяющие расстояние до препятствия с помощью радара или ультразвукового сонара, в пользовании неудобны, требуют привыкания. На дисплее прибора расстояние до преграды определяется по цифровым показателям или интенсивности световых индикаторов. Невозможно определить точное расположение столба, стены, запаркованной машины.

Система кругового обзора
Как правило, показатели всех камер выводятся на отдельный дисплей, разделенный на четыре секции. В движении видеокамеры подключаются к видеорегистратору, на стоянке систему кругового обзора можно подключить к охранной сигнализации.
Контроль водителем дорожной обстановки ухудшается ночью, при плохой видимости, ограничен конусом ближнего или дальнего света. При ночном движении водителя слепят фары попутных (через салонное зеркало) и встречных машин.
Для ликвидации этих несовершенств человеческого зрения предназначены системы ночного видения, при плохой видимости распознающие дорожные препятствия, машины с выключенным светом, пешеходов и животных, выбегающих на дорогу.
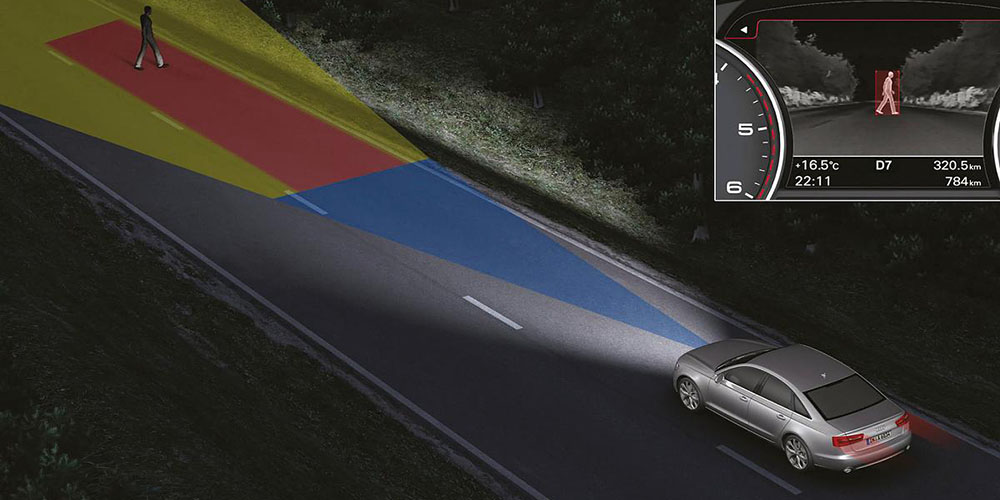
Работа системы ночного видения автомобиля
Из существующих приборов (активных и пассивных) для дальнейшей разработки более перспективны активные системы, построенные на использовании инфракрасных излучателей, вмонтированных в головное освещение.
Принимающая видеокамера с тепловизором передает серое изображение автомагистрали (с подсвеченным желтым контуром помехи) на отдельный дисплей. В других моделях систем ночного видения изображение тепловизора передается на экран навигатора или проецируется на лобовое стекло автомобиля (при появлении помехи).
Читайте также: