
Кинематическая схема мальтийского креста
Обновлено: 04.07.2024
В заметке "История кинотехники" ("Наука и жизнь" № 6, 2001 г.) упоминался механизм для осуществления прерывистого движения ленты - мальтийский крест. Как выглядел этот механизм и почему он получил такое странное название? Л. Ермакова (Москва).
Во многих технических устройствах возникает задача - преобразовать непрерывное вращение ведущего вала в периодические повороты с остановками вала ведомого. В кинопроекторах это необходимо для остановки кадра на пленке перед объективом, в различных станках-автоматах - для остановки детали или инструмента на время работы. Устройство, осуществляющее такое движение, получило название "мальтийский механизм" или "мальтийский крест".
Ведущее звено механизма - кривошип - имеет вид диска со стальным пальцем на крае и цилиндрическим выступом в центре. Выступ имеет полукруглую выемку напротив пальца. Ведомый элемент (он-то и называется "крестом") представляет собой пластину с несколькими (обычно от 3 до 12) прорезями. Стороны пластины очерчены дугами окружности того же радиуса, что и выступ кривошипа.
При вращении ведущего вала палец кривошипа входит в прорезь креста и, скользя в ней, поворачивает ведомый вал на 1/ n часть оборота ( n - число прорезей). Повернувшись, вал останавливается (от самопроизвольного проворачивания его предохраняет запирающее устройство). При следующем повороте кривошипа его палец входит в другую прорезь креста, и процесс повторяется. При равномерном вращении кривошипа отношение времени движения креста к времени его остановки равно ( n - 2)/( n + 2).
Более широкое применение нашел мальтийский механизм с внутренним зацеплением. Он компактнее и поворачивает крест более плавно. Кривошип может иметь несколько пальцев, а более сложная конструкция самого механизма позволяет передавать движение между валами, которые скрещиваются под углом до 90 градусов.
Название свое механизм получил по одному из названий духовно-рыцарского ордена иоаннитов или госпитальеров. Орден был основан в Палестине в начале XII века крестоносцами и имел резиденцию в иерусалимском госпитале Святого Иоанна (доме для паломников). В 1530 году иоанниты обосновались на острове Мальта и стали называться Мальтийским орденом. В декабре 1798 года Великим магистром ордена был избран русский император Павел I. Орден существует и поныне, его знаком служит четырехконечный крест с вогнутыми концами. Ведомый элемент механизма прерывистого движения с внешним зацеплением по форме очень напоминает его.
Мальтийский механизм
Во многих технических устройствах возникает задача — преобразовать непрерывное вращение ведущего вала в периодические повороты с остановками вала ведомого. В кинопроекторах это необходимо для остановки кадра на пленке перед объективом, в часах для перевода секундной стрелки, в различных станках-автоматах — для остановки детали или инструмента на время работы. Устройство, осуществляющее такое движение, получило название мальтийский механизм или мальтийский крест. Своеобразное имя механизм получил из-за сходства ведомой части механизма c мальтийским крестом ордена иоаннитов. Великим магистром этого ордена в 1798 году был избран русский император Павел I.

Различают мальтийские механизмы на два крупнейших подвида.
1. Мальтийский механизм с внешним зацеплением

2. Мальтийский механизм с внутренним зацеплением

Более широкое применение нашел мальтийский механизм с внутренним зацеплением. Он компактнее и поворачивает крест более плавно. Также механизмы могут отличаться количеством кривошипов или количеством пазов в кресте.
Периодическое движение ведомого звена обеспечивает палец, вращающийся на ведущем колесе (кривошипе), который входя в паз креста вращает его пока не выйдет из зацепления, совершив оборот на определенный угол (зависит от количества кривошипов) палец входит в следующий паз и вновь повторяет цикл. Для того чтобы ведомое звено не прокручивалась инерционно при внешнем зацеплении, делают стопорный сегмент, который имеет радиус равный радиусу наружных дуг креста. Количество пазов на кресте может быть от 3 до 12. При равномерном вращении кривошипа отношение времени движения креста к времени его остановки равно (n - 2)/(n + 2), где n - число прорезей.
Мальтийский механизм (крест)
Мальтийские кресты широко применяются в машинных автоматах. Они относятся к механизмам прерывистого действия и предназначены для преобразования равномерного вращения ведущего звена в периодические с остановками ведомого звена, работают плавно без ударов (в отличие от храповых механизмов).
Наиболее распространенные мальтийские механизмы с внешним зацеплением (рис. 1.17). Такой механизм состоит из ведущего кривошипа 7, ролика 2 на его конце, мальтийского креста 3. При вращении кривошипа 1 ролик 2 входит в паз 4 мальтийского креста 3 и возвращает его на заданный угол. После выхода ролика 2 из паза 4 угловое положение мальтийского креста фиксируется цилиндрической поверхностью диска.
Мальтийские механизмы проектируются с числом пазов мальтийского креста, равным 3 + 12. Расчеты храповых механизмов на прочность проводятся в зависимости от вращающего момента на вале храпового колеса.

Рис. 1.17. Мальтийский механизм: 1 — ведущий кривошип;
2 — ролик; 3 - мальтийский крест; 4 - паз мальтийского креста
Ответы на вопросы
1.1. Машина-орудие воспринимает энергию, которая затрачивается на преодоление внешних сил, непосредственно связанных с процессом производства, а машина-двигатель превращает энергию и передает ее через передаточный механизм (например, редуктор) машине-орудию. На рис. 1.2 передача — поз. 3—4—6.
1.2. На рис. 1.2 показана передача зацеплением, с гибкой связью и параллельными валами.
Рис. 1.18. Трехступенчатая передача
1.6. Если известна мощность Р и угловая скорость со, то вращающий
Подставив значения Pt и Р2 вформулу для определения КПД, получим
Если известны вращающие моменты, то передаточное число .
2.1. Фрикционная передача — механическая передача, служащая для передачи вращательного движения (или для преобразования вращательного движения в поступательное) между валами с помощью сил трения, возникающих между катками, цилиндрами или конусами, насаженными на валы и прижимаемыми один к другому.
Фрикционные передачи состоят из двух катков (рис. 2.1): ведущего 1 и ведомого 2, которые прижимаются один к другому силой Fr (на рисунке — пружиной), так что сила трения Ту в месте контакта катков достаточна для передаваемой окружной силы Ft.

Рис. 2.1. Цилиндрическая фрикционная передача:
1 — ведущий каток; 2 — ведомый каток
Условие работоспособности передачи:
Нарушение условия (2.1) приводит к буксованию. Один каток к другому может быть прижат:
• предварительно затянутыми пружинами (в передачах, предназначен
ных для работы при небольших нагрузках);
• гидроцилиндрами (при передаче больших нагрузок);
• собственной массой машины или узла;
• через систему рычагов с помощью перечисленных выше средств;
• центробежной силой (в случае сложного движения катков в планетарных системах).
Узлы и механизмы полиграфического оборудования. Зубчатые механизмы. Прочностные расчеты зубчатых передач , страница 25
Мальтийские механизмы (рис. 7.2) применяются в приборах для преобразования вращательного непрерывного движения в прерывистое, например, в механизме прерывистого движения карточных перфораторов и др.
Число лопастей креста 1 обычно не менее трех. Число ведущих пальцев 3 может быть два, три и более. Так как крест поворачивается на некоторый угол поворота оси О, то время его движения обозначим через tд, а время покоя – tп. Если угол φ будет больше π/2, то в момент вступления пальца в соприкосновение с крестом наблюдается жесткий удар. Если φ
Мальтийские кресты широко применяются в машинных автоматах. Они относятся к механизмам прерывистого действия и предназначены для преобразования равномерного вращения ведущего звена в периодические с остановками ведомого звена, работают плавно без ударов (в отличие от храповых механизмов).
Наиболее распространенные мальтийские механизмы с внешним зацеплением (рис. 1.17). Такой механизм состоит из ведущего кривошипа 7, ролика 2 на его конце, мальтийского креста 3. При вращении кривошипа 1 ролик 2 входит в паз 4 мальтийского креста 3 и возвращает его на заданный угол. После выхода ролика 2 из паза 4 угловое положение мальтийского креста фиксируется цилиндрической поверхностью диска.
Мальтийские механизмы проектируются с числом пазов мальтийского креста, равным 3 + 12. Расчеты храповых механизмов на прочность проводятся в зависимости от вращающего момента на вале храпового колеса.
Рис. 1.17. Мальтийский механизм: 1 — ведущий кривошип;
2 — ролик; 3 - мальтийский крест; 4 - паз мальтийского креста
Ответы на вопросы
1.1. Машина-орудие воспринимает энергию, которая затрачивается на преодоление внешних сил, непосредственно связанных с процессом производства, а машина-двигатель превращает энергию и передает ее через передаточный механизм (например, редуктор) машине-орудию. На рис. 1.2 передача — поз. 3—4—6.
1.2. На рис. 1.2 показана передача зацеплением, с гибкой связью и параллельными валами.
1.4. Рис. 1.18.

Рис. 1.18. Трехступенчатая передача
1.5. и =D2/D1 = ω1/ω2 (это без учета скольжения).
1.6. Если известна мощность Р и угловая скорость со, то вращающий
момент Т = Р/ω Н • м. Отсюда на ведущем валу , на ведомом ,
Подставив значения Pt и Р2 вформулу для определения КПД, получим
Передачи вращательного движения служат не только для преобразования скоростей и передачи энергии, но и для преобразования моментов Т2=Т1uη.
Если известны вращающие моменты, то передаточное число .
Глава 2
ФРИКЦИОННЫЕ ПЕРЕДАЧИ
Общие сведения
2.1. Фрикционная передача — механическая передача, служащая для передачи вращательного движения (или для преобразования вращательного движения в поступательное) между валами с помощью сил трения, возникающих между катками, цилиндрами или конусами, насаженными на валы и прижимаемыми один к другому.
Фрикционные передачи состоят из двух катков (рис. 2.1): ведущего 1 и ведомого 2, которые прижимаются один к другому силой Fr (на рисунке — пружиной), так что сила трения Ту в месте контакта катков достаточна для передаваемой окружной силы Ft.
Рис. 2.1. Цилиндрическая фрикционная передача:
1 — ведущий каток; 2 — ведомый каток
Условие работоспособности передачи:
Нарушение условия (2.1) приводит к буксованию. Один каток к другому может быть прижат:
• предварительно затянутыми пружинами (в передачах, предназначен
ных для работы при небольших нагрузках);
• гидроцилиндрами (при передаче больших нагрузок);
• собственной массой машины или узла;
• через систему рычагов с помощью перечисленных выше средств;
• центробежной силой (в случае сложного движения катков в планетарных системах).
Механизмы поворота находят широкое применение в автоматах, агрегатных станках и автоматических линиях различного технологического назначения. Они используются для осуществления делительного поворота шпиндельных блоков, поворотных столов, каруселей, а также в механизмах ориентации обрабатываемых заготовок автоматизированного оборудования. Механизмы поворота могут быть механические, гидравлические, пневмогидравлические, и пневматические. Широко применяются в автоматах, агрегатных станках и автоматических линиях механические и гидравлические механизмы поворота.
Механические поворотные устройства в свою очередь можно разделить на четыре основные группы: зубчатые, рычажные, кулачковые и мальтийские механизмы. Основные требования, предъявляемые к механизмам поворота, следующие: быстрота, плавность и точность установки в рабочую позицию поворачиваемого узла, надежность и долговечность работы, простота конструкции.
Для обеспечения точного положения поворотных устройств после поворота и стабильности их положения под воздействием нагрузки применяют механизмы фиксации. Наибольшее распространение получили мальтийские механизмы, которые применяются для периодического поворота шпиндельных блоков, револьверных головок, поворотных головок, поворотных столов, каруселей и других узлов, в станках-автоматах и автоматических линиях.
По полученным исходным данным и приведённому в [1] и [2] алгоритму произвести проектировочный и проверочный расчёты мальтийского креста с использованием ПК MathCAD.
Весь расчёт, выполненный в MathCAD представлен в приложении.
Исходные данные
Индивидуальные данные по расчётному заданию
| Тип мальтийского механизма | Механизм с внешним зацеплением |
| Число пазов креста Z | 12 |
| Межосевое расстояние А, мм | 400 |
| Время поворота tд, с | 2,5 |
| Диаметр планшайбы D, мм | 1200 |
| Масса подвижного узла G, кг | 1200 |
Кинематический анализ и расчёт мальтийских механизмов
Основные особенности и принцип действия мальтийских механизмов
Наиболее широко применяют “правильные” мальтийские механизмы с внешним и внутренним зацеплением, а также сферические, обеспечивающие поворот узлов на равные углы с постоянной продолжительностью периодов простоя и движения. Мальтийские механизмы состоят из следующих основных элементов: мальтийского креста, кривошипа (поводка) с пальцем. Кривошип вращается с постоянной скоростью w0, а палец входит поочередно в радиальные пазы креста, поворачивая его каждый раз на 1/z оборота, где z-число пазов креста. После выхода пальца (ролика) из паза крест останавливается, и его положение фиксируется каким-либо устройством. Время поворота подвижного узла соответствует времени холостого хода, а время простоя – времени обработки в цикле технологического процесса.
Мальтийские механизмы отличаются высоким КПД и простотой конструкции. Они обеспечивают достаточную плавность и быстроту поворота при высокой надежности в работе. К их недостаткам относятся непостоянство скорости креста и связанных с ним деталей, большие пики ускорения (особенно при малом числе пазов), что вызывает повышенные инерционные нагрузки. Для обеспечения плавной работы механизма угловая скорость креста должна быть равна нулю в момент входа пальца кривошипа в паз креста и в момент выхода из него. Для этого центр кривошипа должен быть расположен так, чтобы в момент входа и выхода пальца вектор его скорости был направлен вдоль оси паза креста.
Определение углов поворота и коэффициентов времени работы мальтийских механизмов
Расчётная схема мальтийского механизма с внешним зацеплением показана на рис.1, где 2α - угол поворота креста, 2β - угол поворота кривошипа, Rк- радиус креста, А - межосевое расстояние, z - число пазов креста, r - радиус кривошипа.

Рис.1. - Расчётная схема мальтийского механизма: 1 – мальтийский крест; 2 – кривошип; 3 – палец

Полный угол поворота креста:
Тогда: , ;

Время движения креста: .

Следовательно, частота вращения вала кривошипа:

Угловая скорость вращения кривошипа:

Время простоя (останова): ;

Время полного оборота кривошипа:

Коэффициент времени работы мальтийского механизма:
Механизмы мальтийского креста (рис. 6.12) являются, по существу, разновидностью кулисных механизмов (см. рис. 6.10, в). Роль кулисы выполняют по очереди пазы 1 мальтийского креста 2, а роль ползуна – цевка 4.

Рис. 6.12. Механизм мальтийского креста:
1 – паз; 2 – крест; 3 – кривошип; 4 – цевка
Таким образом, крест и приводимые им в движение детали совершают периодические (шаговые) повороты. Времена поворота и выстоя креста определяются скоростью вращения кривошипа и числом пазов креста. Движение креста, как кулисы, является неравномерным – с разгоном и торможением.
Передаточное отношение механизма мальтийского креста u ¹ const. Также и КПД механизма h ¹ const. Примерный вид графиков j = f1(a), = f2(a),, = f3(a), где j – угол поворота креста, a – угол поворота кривошипа, приведен на рис. 6.13.
Максимальная угловая скорость креста равна

, (6.22)
где w1 – скорость вращения кривошипа;

(см. рис. 6.12).
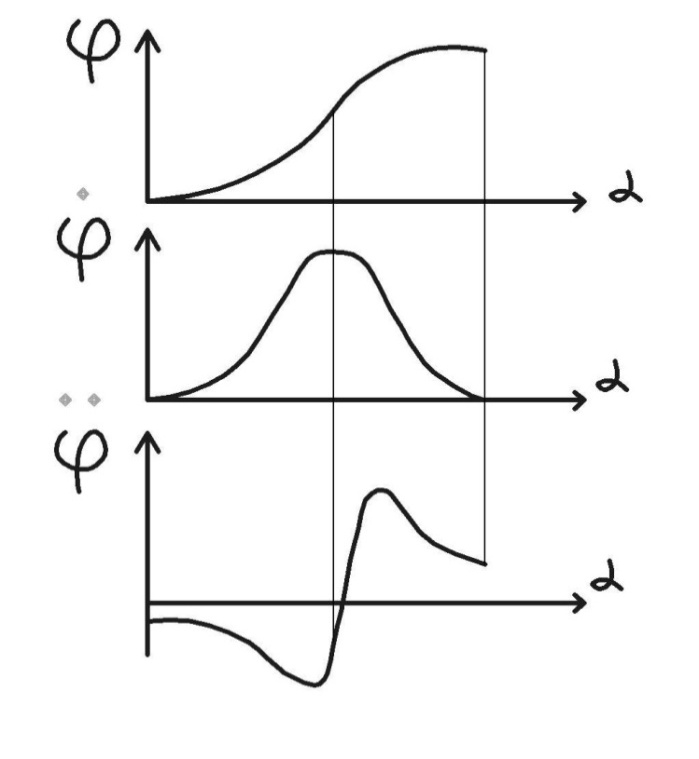
Рис. 6.13. Перемещение, скорость и ускорение мальтийского креста
Максимальное угловое ускорение креста

(6.23)

(6.24)
Длины кривошипа R = O1A и стойки L = О1О2 связаны зависимостью R = Lsin(p/z). Истинные размеры звеньев механизма выбираются исходя из: соображений компоновки, нагрузок в звеньях и шарнирах механизма, жесткости и точности механизма и др.
Механизм мальтийского креста широко применяется в транспортирующих устройствах технологических машин и линий, обеспечивая шаговое перемещение с плавным разгоном и торможением. На рис. 6.14, а изображена схема привода цепного линейного транспортера, а на рис. 6.14, б – схема привода кругового транспортирующего устройства – карусели.

Рис. 6.14. Привод транспортирующего устройства:
а – линейного, б – кругового;
1 – цепной транспортер; 2 – мальтийский крест; 3 – кривошип; 4 – карусель;
5, 6 – зубчатая передача
Кривошип 3 мальтийского механизма закреплен на выходном валу редуктора P. Мальтийский крест в схеме а поворачивает звездочки цепного транспортера, а в схеме б поворачивает шестерню 6 зубчатой передачи. Передача позволяет изменить шаг поворота карусели по сравнению с шагом, определяемым числом пазов креста. Шаг поворота карусели, в этом случае, будет

(6.25)
где u – передаточное отношение зубчатой передачи.
В технологических машинах время выстоя транспортера используется для выполнения какой-либо операции – это рабочее время tp, а время движения – это потери времени, холостое время tx, поэтому стремятся увеличить tp и уменьшить tx.
Если кривошип мальтийского механизма, вращается с постоянной скоростью w1 = const, то угол поворота кривошипа aп (см. рис. 6.12), соответствующий повороту креста на один шаг

(6.26)
Угол поворота кривошипа aв, когда крест стоит

(6.27)
Время поворота креста

(6.28)
Время выстоя креста

(6.29)
Отношение времени поворота и выстоя

(6.30)
Читайте также: