
Принцип работы стеклоподъемников по кан шине
Обновлено: 04.07.2024
Бортовые системы электроники в современных легковых и грузовых автомобилях обладают огромным количеством дополнительных устройств и исполнительных механизмов. Для того, чтобы обмен информацией между всеми устройствами был максимально эффективен, в автомобиле должна быть надежная коммуникационная сеть. В начале 80-ых годов 20 века компания Bosch и разработчик Intel предложили новый сетевой интерфейс – Controller Area Network, который в народе называется Can-шина.
1 О принципе работы сетевого интерфейса CAN-шина
Кан-шина в автомобиле предназначена для обеспечения подключения любых электронных устройств, которые способны передавать и получать определенную информацию. Таким образом, данные о техническом состоянии систем и управляющие сигналы проходят по витой паре в цифровом формате. Такая схема позволила снизить негативное влияние внешних электромагнитных полей и существенно увеличить скорость передачи данных по протоколу (правила, по которым блоки управления различными системами способны обмениваться информацией).
Кроме того, диагностика ЭБУ различных систем автомобиля своими руками стала проще. За счет применения подобной системы в составе бортовой сети автомобиля высвободилось определенное количество проводников, которые способны обеспечивать связь по различным протоколам, например, между блоком управления двигателем и диагностическим оборудованием, системой сигнализации. Именно наличие Кан-шины в автомобиле позволяет владельцу своими руками выявлять неисправности контроллеров и ошибки с помощью специального диагностического оборудования.

Похожие статьи
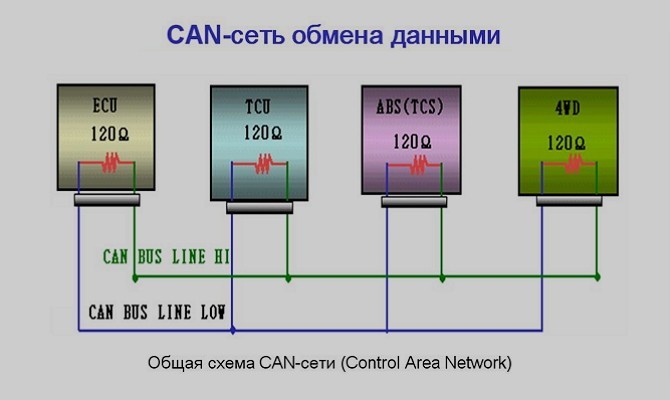
CAN-шина – это специальная сеть, с помощью которой осуществляется передача и обмен данными между различными узлами управления. Каждый из узлов состоит из микропроцессора (CPU) и CAN-контроллера, с помощью которого реализуется исполняемый протокол и обеспечивается взаимодействие с сетью автомобиля. Шина Кан имеет минимум две пары проводов – CAN_L и CAN_H, по которым и передаются сигналы посредством трансиверов – приемо-передатчиков, способных усиливать сигнал от управляющих устройств сети. Кроме того, трансиверы выполняют и такие функции как:
- регулировка скорости передачи данных посредством усиления или уменьшения подачи тока;
- ограничение тока для предотвращения повреждения датчика или замыкания линий передачи;
- тепловая защита.
2 Особенности работы сети

3 Кан-интерфейс и диагностика системы

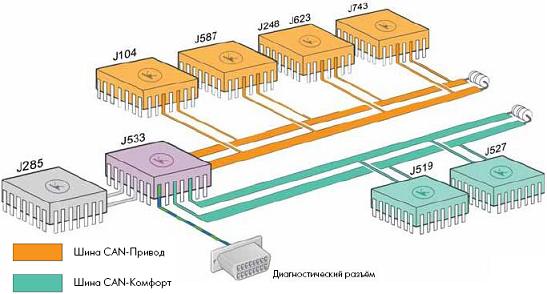
Подобный преобразователь также предназначен для ввода или вывода определенной диагностической информации по проводу "К"-линия, который подключается во время диагностики или изменения параметров работы сети либо в диагностический разъем либо непосредственно к преобразователю.
Важно отметить, что определенных стандартов для разъемов сети Can на сегодняшний день не существует. Поэтому каждый из протоколов определяет свой тип разъемов на CAN-шине, в зависимости от нагрузки и других параметров.
Таким образом, при проведении диагностических работ своими руками используется унифицированный разъем типа OBD1 или OBD2, который можно встретить на большинстве современных иномарок и отечественных автомобилей. Однако, некоторые модели автомобилей, например Volkswagen Golf 5V, Audi S4, не имеют межсетевого интерфейса. Кроме того, схема блоков управления и CAN-шины индивидуальна для каждой марки и модели авто. Для того, чтобы провести диагностику CAN-системы своими руками, используется специальная аппаратура, которая состоит из осциллографа, анализатора CAN и цифрового мультиметра.

Современные автомобили всё больше подстраиваются под конкретные потребности людей. В них появилось много дополнительных систем и функций, которые связаны с необходимостью передачи определённой информации. Если бы к каждой такой системе пришлось подключать отдельные провода, как это было раньше, то весь салон превратился бы в сплошную паутину и водителю сложно было бы управлять машиной из-за большого количества проводов. Но решение этой проблемы нашлось – это установка Can-шины. Какая её роль водитель смогут узнать сейчас.
Can шина – имеет ли она что-то общее с обычными шинами и для чего нужна
Когда была разработана цифровая CAN шина и какое её назначение

Разработка цифровой шины началась ещё в двадцатом веке. Ответственность за этот проект взяли на себя две компании – INTEL и BOSCH.После некоторых совместных усилий, специалистами этих компаний был разработан сетевой индикатор – CAN. Это была проводная система нового образца, по которой передаются данные. Такую разработку назвали шиной. Она являет собой два витых провода достаточно крупной толщины и по ним передаётся вся необходимая информация для каждой из систем автомобиля. Есть и шина, которая представляет из себя жгут проводов – её называют параллельной.
Если к CAN шине подключить автосигнализацию, то возможности охранной системы увеличатся, а прямым назначением этой автомобильной системы можно назвать:
- упрощение механизма подключения и работы дополнительных систем автомобиля;
- возможность подключить к системе автомобиля любые устройства;
- возможность одновременно принимать и передавать цифровую информацию из нескольких источников;
- снижает влияние внешних электромагнитных полей на работоспособность основных и дополнительных систем автомобиля;
- ускоряет процесс передачи данных к необходимым устройствам и системам машины.
Чтобы подключиться к CAN шине необходимо найти в системе проводов оранжевый, он должен быть толстым. Именно к нему нужно подключаться, чтобы наладить взаимодействие с цифровой шиной. Эта система работает как анализатор и распространитель информации, благодаря ей обеспечивается качественная и регулярная работа всех систем автомобиля.
Can шина – параметры скорости и особенности передачи данных

Если к цифровой шине подключена автосигнализация, то информация от неё будет поступать максимально быстро, а заданные человеком команды, при помощи брелока, будут исполнены точно и вовремя. Анализатор системы работает без перебоев и поэтому работа всех систем машины будет постоянно исправной.
Цифровая шина – это целая сеть контролёров, которые объединились в одно компактное устройство и имеют возможность быстро получать или передавать информацию, запуская или отключая определённые системы. Последовательный режим передачи данных делает работу системы более слаженной и корректной. CAN шина – это механизм, который имеет тип доступа Collision Resolving и при установке дополнительного оборудования необходимо учитывать этот факт.
Могут ли возникать проблемы в работе кан шины
Кан шина или цифровая шина работает со многими системами одновременно и постоянно занимается передачей данных. Но как и в каждой системе, в механизме CAN шины могут происходить сбои и от этого анализатор информации будет работать крайне некорректно. Проблемы с кан шиной могут возникать из-за следующих ситуаций:
- произошёл обрыв проводников системы;
- случилось замыкание на массу или на батарею;
- замыкание систем CAN-High или CAN-Low – белее или менее скоростного режима работы системы цифровой шины;
- при слишком низком напряжении системы или полной разрядке аккумулятора;
- если отсутствуют резиновые перемычки;
- из-за неисправной катушки зажигания и других проблем похожего характера.
При выявлении неисправности системы необходимо искать причину этого, учитывая что она может скрываться в дополнительном оборудовании, которое устанавливалось – автосигнализация, датчики и другие внешние системы. Поиски проблемы должны производиться следующим образом:
- проверить работу системы в целом и запросить банк неисправностей;
- проверка напряжения и сопротивления проводников;
- проверка сопротивления резисторных перемычек.
Если с цифровой шиной возникают проблемы и анализатор не может продолжать корректную работу не стоит пытаться самостоятельно решить эту проблему. Для грамотной диагностики и произведения необходимых действий необходима поддержка специалиста в этой области.
Какие системы входят в современную Can шину автомобиля
Все знают что кан шина – это анализатор информации и доступное устройство для передачи команд к основным и дополнительным системам транспортного средства, дополнительному оборудованию – автосигнализация, датчики, трекеры. Современная цифровая шина включает в себя следующие системы:
В этот список не ходят внешние системы, которые можно подключать к цифровой шине. На месте таких может быть автосигнализация или дополнительное оборудования подобного типа. Получать информацию с кан шины и следить за тем, как работает анализатор можно при помощи компьютера. Для этого необходима установка дополнительного адаптера. Если к кан-шине подключена сигнализация и дополнительно маяк, то можно управлять некоторыми системами автомобиля, используя для этого мобильный телефон.
Не каждая сигнализация имеет возможность подключения к цифровой шине. Если владелец автомобиля хочет, чтобы его автосигнализация имела дополнительный возможности, а он постоянно мог управлять системами своего автомобиля на расстоянии, стоит задуматься о покупке более дорогого и современного варианта охранной системы. Такая сигнализация легко подключается к проводу кан шины и работает очень эффективно.
CAN шина, как подключается автосигнализация к цифровой шине
Анализатор цифровой шины справляется не только со внутренними системами и устройствами автомобиля. Подключение внешних элементов –сигнализация, датчики, другие устройства, добавляет цифровому устройству больше нагрузки, но при этом его продуктивность остаётся прежней. Автосигнализация, которая имеет адаптер для подключения к цифровой шине устанавливается по стандартной схеме, а для того, чтобы подключиться к CAN необходимо пройти несколько простых шагов:
- Автосигнализация по стандартной схеме подключается ко всем точкам автомобиля.
- Владелец транспортного средства ищет оранжевый, толстый провод – он ведёт к цифровой шине.
- Адаптер сигнализации подключается к проводу цифровой шины автомобиля.
- Производятся необходимые закрепляющие действия –установка системы в надёжном месте, изоляция проводов, проверка правильности произведённого процесса.
- Настраиваются каналы для работы с системой, задаётся функциональный ряд.
Возможности современной цифровой шины велики, ведь виток из двух проводов объединяет в себе доступ до всех основных и дополнительных систем автомобиля. Это помогает избежать наличия большого количества проводов в салоне и упрощает работу всей системы. Цифровая шина работает по типу компьютера, а это в современном мире очень актуально и удобно.
CAN – стандарт обмена информации промышленной автоматики, призванный объединить в единое сообщество все многообразие электронного оборудования.
Протокол разработан на основе стандартов ISO передачи данных.
В середине 80-х годов прошлого столетия компании Intel и Robert Bosch GmbH разработали цифровое устройство для обмена данных, которое стало стандартом автомобильной
электроники.
Подобно тому, как собираются в единую сеть несколько компьютеров, CAN собирает в цепь все электронные блоки автомобиля. Это делает управление более надежным, быстрым и эффективным. Кроме того, через кабель CAN происходит обмен данными между ЭБУ и сторонними электроприборами, что делает диагностику автомобиля максимально точной и быстрой.
Особенности устройства CAN-шины
Передаются данные, со скоростью 1Мбит/сек, по радиоканалам или на оптоволоконном уровне. Биты данных одномоментно превращаются в кадры (подобие ограниченных порций). Есть сложная схема разделения кадров на доминантные и рецессивные и приоритетов формирования очереди передачи, с применением арбитража. Однако в эти области высоких технологий, простому автолюбителю заглядывать нет никакой нужды.

Во всех системах современного автомобиля применяется протокол CAN для взаимодействия электронного блока управления с контрольными блоками систем, исполнительными устройствами, датчиками, и в целом всей совокупности периферийного оборудования. Устройство столь умного прибора, на удивление, очень простое (можно сказать примитивное) – два провода и чип. Вот и все!
Первые поколения прибора были снабжены множеством выходов, по каждому их которых передавался лишь один сигнал. Сейчас, по каждому проводу проходят сотни импульсов.
В последних выпусках есть функции подключения к смартфонам.
Есть заложенная функция предвидения и устранения некоторых неполадок электрооборудования автомобиля. Даже электробрелки зажигания, подключаясь через CAN, получают необходимые данные от ЭБУ автомобиля.
CAN – шина, практически, абсолютно нечувствительна к радиопомехам, с высокой степени изолированными контактами.
Передача данных по Кан-шине
Сигналы с электронных приборов, параллельно соединенных в цепь Кан-шины, по двум сплетенным проводам (витой паре), поступает на полосы шины. При этом, на каждом проводе будет свое напряжение, отличное от напряжения во втором проводе.
Тот, получив наказ на какое-либо действие, спешит его выполнить.
Каждое звено общей цепи подключается к CAN кабелю посредством трансивера, в котором разность двух напряжений преобразуется в одно, выходное (2В). Его и получают участники процесса. Таким образом, исключается влияние на обмен информации, непостоянство напряжения электрической сети автомобиля.
Обзор возможностей протокола CAN
— сигнальная сбалансированная двухпроводная схема high–speed CAN представляет вторую часть стандарта ISO 11898;
— третья часть ISO 11898 составляет следующий уровень вышеназванной схемы;
— однопроводной уровень, описываемый стандартом SAE J2411. Шины этого уровня установлены, например, на автомобилях линейки Дженерал Моторс.
- Прерывание конца – CAN-шина должна содержать на конце резисторное сопротивление (120ОМ), для гашения отражения сигнала, создания уровня постоянного тока.
- Кабель – сопротивление должно укладываться в интервал 108 – 132ОМ.
- Разъем – нет стандартов для разъемов CAN. Каждый протокол описывает свои предпочтения. Однако есть фактический стандарт для автопромышленности.
- Ошибка – контролер найдет ее и отметит флажком, разрушая передачу. Эти флажки станут знаком для всех участников цепи на ее сброс.
- Сбои в передачи – при различных сбоях дается возможность дальнейшего функционирования. Сбои могут быть разного характера: прерывание, короткое замыкание в разных частях, разъединение с оконечным сопротивлением.
Скорость передачи данных CAN-шины
Все составляющие сети CAN должны иметь единую скорость передачи информации. Однако данный стандарт не задает одного определенного параметра, ограничиваясь лишь максимальным пределом – 1Мбит/с. Изменения объема передаваемого кадра должно успеть распространиться по всей длине сети, что ставит в обратную зависимость скорости от протяженности – чем длиннее провод, тем ниже скорость. Для передачи 1Мбита за 1секунду нужная длина должна составлять не менее 40 метров. Добавьте к этому объективные факторы, снижающие скорость – защита от помех и разветвленная сеть, где происходят множественные отражения сигнала.
В угоду ускорения процесса, разработчики уменьшают протяженность проводов, одновременно увеличивая число цепей, с возможностью подключения большего количества приборов. Например, общая длина шины, составляющая 10 метров, способна пропускать через себя кадры, со скоростью 2 Мбит/c, с 64 подключенными приборами. Если автомобиль снабжен большим числом электрооборудования, то добавляется одна, две, и т. д. цепи.
Протоколы высокого уровня
CAN всего лишь решает проблему доставки информации из одного пункта в другой, малыми пакетами (всего 8 байт). Многие аспекты обмена данных, остаются вне его компетенции. Ввиду большого спроса на рынке, незамедлительно, появились разработки усовершенствованных протоколов – так называемые, протоколы высокого уровня. Они взялись оказывать более расширенный пакет услуг. Ими пользуются, когда нужно:
Достоинства и недостатки протокола CAN
Протокол CAN вошел в состав стандартного протокола OBD-II.
К несомненным преимуществам CAN относятся:
- Передача информации в реальном времени;
- Простота и дешевизна использования;
- Помехоустойчивость;
- Обеспечение доступа, путем арбитража, без снижения пропускных характеристик сети;
- Контроль всех ошибок обмена данных;
- Большой интервал рабочих скоростей;
- Широкое его применение, большое разнообразие ассортимента от разных поставщиков.
К недостаткам относятся:
- Маленький объем одного пакета данных, который составляет не более 8 байт;
- Служебные данные занимают больше объема, чем передаваемые, что значительно влияет на скорость (разработчикам есть куда расширяться);
- Нет общего стандарта на протоколы повышенного уровня. В CAN можно прописать любой протокол, если его исполнение помещается в рамках пропускной способности CAN.
Применяется этот протокол не только в автомобильной промышленности. В некоторых отраслях промышленности, дорожного строительства, при строительстве высокотехнологичных объектов (так называемые, умные дома), в велосипедном производстве.

Арбитраж
В шине CAN биты 0 и 1 имеют ещё одно название: рецессивный уровень и доминантный уровень, соответственно. Если двумя разными передатчиками будет одновремнно передан рецессивный и доминантный уровни, то доминантный уровень подавит рецессивный. Этим механизмом подавления обеспечивается арбитраж на шине. Каждый передатчик одновремнено считывает то, что он предаёт в шину. Передатчик с более низким приоритетом вынужден отпустить шину, так как чужой доминантный уровень с более высоким приоритетом исказил его предачу. В то же время, пакет с более высоким уровнем остался неизменным. Передатчик, потерявший арбитраж, может повторить попытку через некоторе время.
Физический уровень
В автомобиле может применяться несколько типов шин CAN.
Высокоскоростной CAN (High speed) применяется в основном в сети управления двигателем и управления шасси. Там, где необходима высокая скорость реакции. Скорость обмена по этой шине 500 или 250 кбит/сек.
Схема подключения ЭБУ к высокоскоростной шине CAN
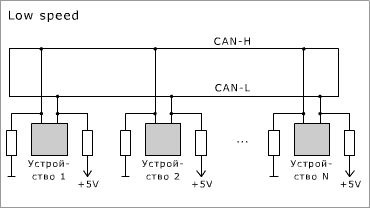
Низкоскоростной CAN (Low speed) применяется в сети управления кузова. Скорость обмена по этой шине, как правило, равняется 125 кбит/сек.
Схема подключения ЭБУ к низкоскоростной шине CAN
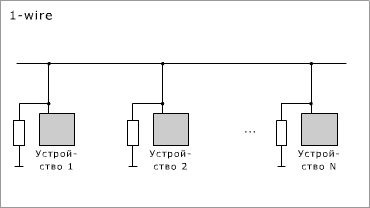
Однопроводный CAN (1-wire) Это удешевлённый варинат Low speed CAN, применяется в основном концерном GM. Используется для коммуникации между ЭБУ кузова машины. Работает на скорости 33,3 кбит/сек.
Схема подключения ЭБУ к однопроводной шине CAN
Надёжность
Двухпроводная шина сохраняет свою работоспособность при обрыве или замыкании одного из проводов (для двухпроводной шины).
Фазы работы
Шина CAN используется в автомобилях достаточно давно. Изначально шина CAN использовалась в простых конфигурациях. Например, для надёжной и быстрой связи между ЭБУ мотора и ЭБУ автоматической коробки передач. В этой конфигурации шина использовалась только для передачи данных. В ЭБУ заводилась линия питания и линия от замка зажигания, диагностика производилась по отдельным К-линиям, идущим из каждого ЭБУ.
В более современных автомобилях, по шине CAN передаётся не только управляющая, но и диагностическая информация. Помимо этого, шина CAN стала управлять системой питания ЭБУ. В этой конфигурации все ЭБУ подключены к общему питанию и шине CAN. Замок зажигания является электронным блоком управления и информация о включении зажигания передаётся от него по CAN шине.
Можно выделить четыре основные фазы работы шины:
Спящий режим
В этом режиме все ЭБУ, кроме ЭБУ замка, находятся в выключенном состоянии. На драйвер CAN подается питание. Драйвер так же находится в спящем состоянии. При этом, его энергопотребление составляет около 0,3 мА.
Пробуждение
Когда вставляется ключ зажигания или открывается дверь, замок выдаёт доминантное состояние в шину CAN. Это приводит к пробуждению CAN драйверов в спящих ЭБУ. Драйверы при обнаружении активности на шине включают стабилизаторы питания в своих ЭБУ.
Активный режим
В активном режиме ЭБУ постоянно обмениваются информацией. Энергопотребление каждого предатчика при доминантных уровнях может достигать 80 мА.
Засыпание
В момент выключения зажигания, по шине CAN выдаётся команда на выключение, после чего каждый ЭБУ сам себя обесточивает и преходит в спящий режим.
Примечание:
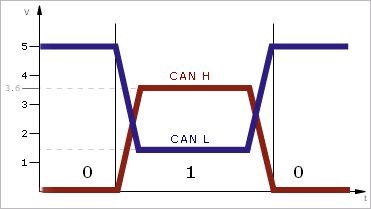
Для однопроводной шины CAN сигнал пробуждения имеет уровень 12 В, обычный обмен 0-4 В.
Немного отступлю от первоисточника.
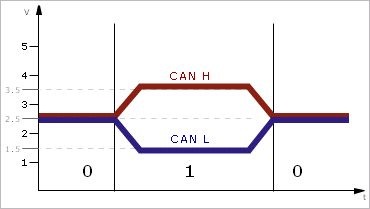
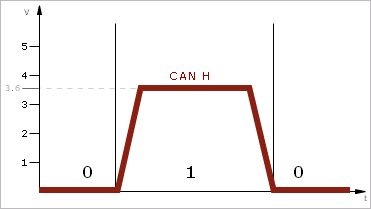
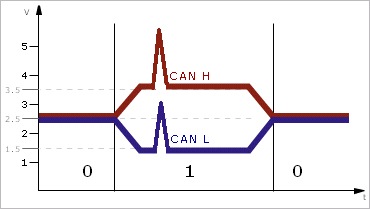
Самый главный плюс, это очень высокая помехозащищённость сигнала. В чём прикол? Одновременно идут два дублирующих сигнала, только один высокий, второй низкий. Ловят они помеху. Помеха воздействует одинаково на оба сигнала. А на выходе у нас одинаковый уровень. Два уровня сигнала компенсируют помеху. Наглядно это выглядит вот так:
Вот такие пироги. Наткнулся тут : quantexlab

Суть CAN-шины
Для чего это нужно? Чтобы важные данные были переданы с минимумом задержек даже ценой того, что маловажные данные не будут переданы на шину (это отличает CAN шину от знакомого всем по компьютерам Ethernet). В случае аварии возможность ЭБУ впрыска получить информацию об этом от контроллера SRS несоизмеримо важнее, чем приборной панели получить очередной пакет данных о скорости движения.
Например, техническая документация Volkswagen определяет три типа применяемых CAN-шин:
Физически же автомобили с CAN-шиной используют ее в виде витой дифференциальной пары: в ней оба провода служат для передачи единственного сигнала, который определяется как разница напряжений на обоих проводах. Это нужно для простой и надежной помехозащиты. Неэкранированный провод работает, как антенна, то есть источник радиопомех способен навести в нем электродвижущую силу, достаточную для того, чтобы помеха воспринялась контроллерами как реально переданный бит информации.
Но в витой паре на обоих проводах значение ЭДС помехи будет одинаковым, так что разница напряжений останется неизменной. Поэтому, чтобы найти CAN-шину в автомобиле, ищите витую пару проводов – главное не перепутать ее с проводкой датчиков ABS, которые так же для защиты от помех прокладываются внутри машины витой парой.
Диагностический разъем CAN-шины не стали придумывать заново: провода вывели на свободные пины уже стандартизированной в OBD-II колодки, в ней CAN-шина находится на контактах 6 (CAN-H) и 14 (CAN-L).

Поскольку CAN-шин на автомобиле может быть несколько, часто практикуется использование на каждой разных физических уровней сигналов. Вновь для примера обратимся к документации Volkswagen. Так выглядит передача данных в моторной шине:





Неисправности

Для того, чтобы понять принципы работы CAN-шины мы решили написать/перевести ряд статей, посвященных этой тематике, как обычно, основываясь на материалах зарубежных источников.
Также можете прочитать вторую нашу переводную статью Введение в CAN.
Мы начнем с основ построения сети CAN-шины. На схеме приведен автомобиль с его системой освещения.

Показана обычная проводка, в которой каждая лампа напрямую подключена с каким-либо переключателем или контактом педали тормоза.
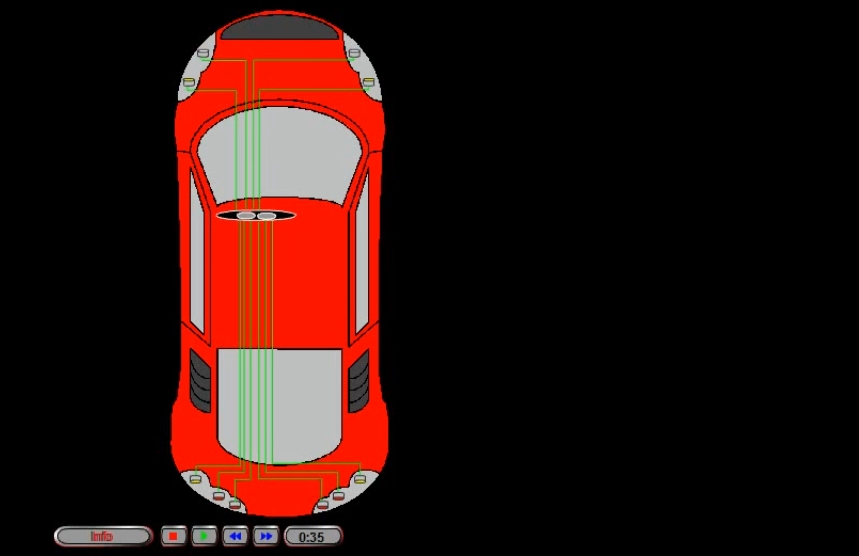
Теперь аналогичная функциональность показана с применением технологии CAN-шины. Передние и задние световые приборы подключены к контролирующим модулям. Контролирующие модули соединены параллельно с такими же проводами шины.
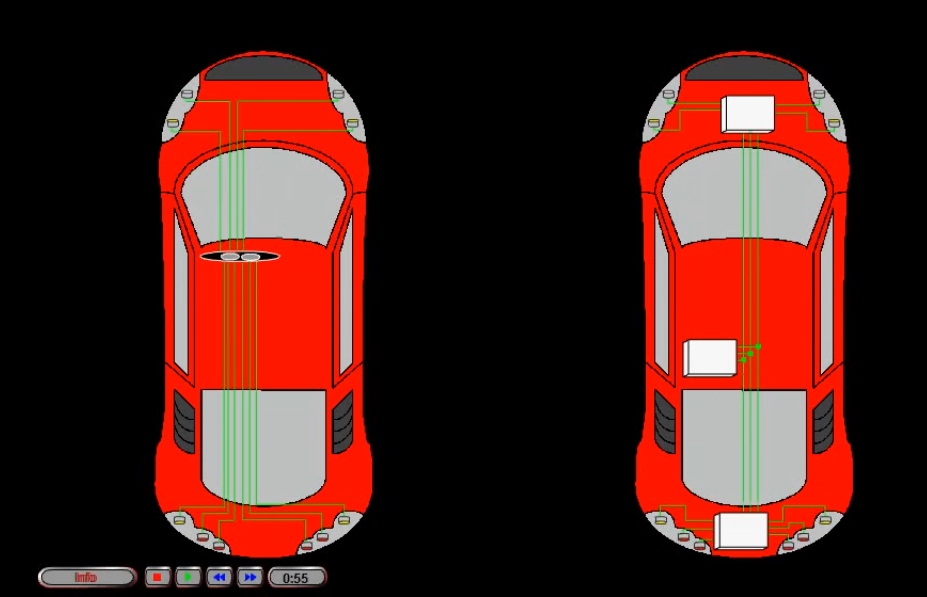
Этот небольшой пример демонстрирует, что объем электропроводки снижается. Вдобавок ко всему модули управления могут обнаруживать перегоревшие лампы и информировать об этом водителя.
Автомобиль на указанном виде содержит четыре модуля управления и четко отражает построение учебной системы (платы) CANBASIC
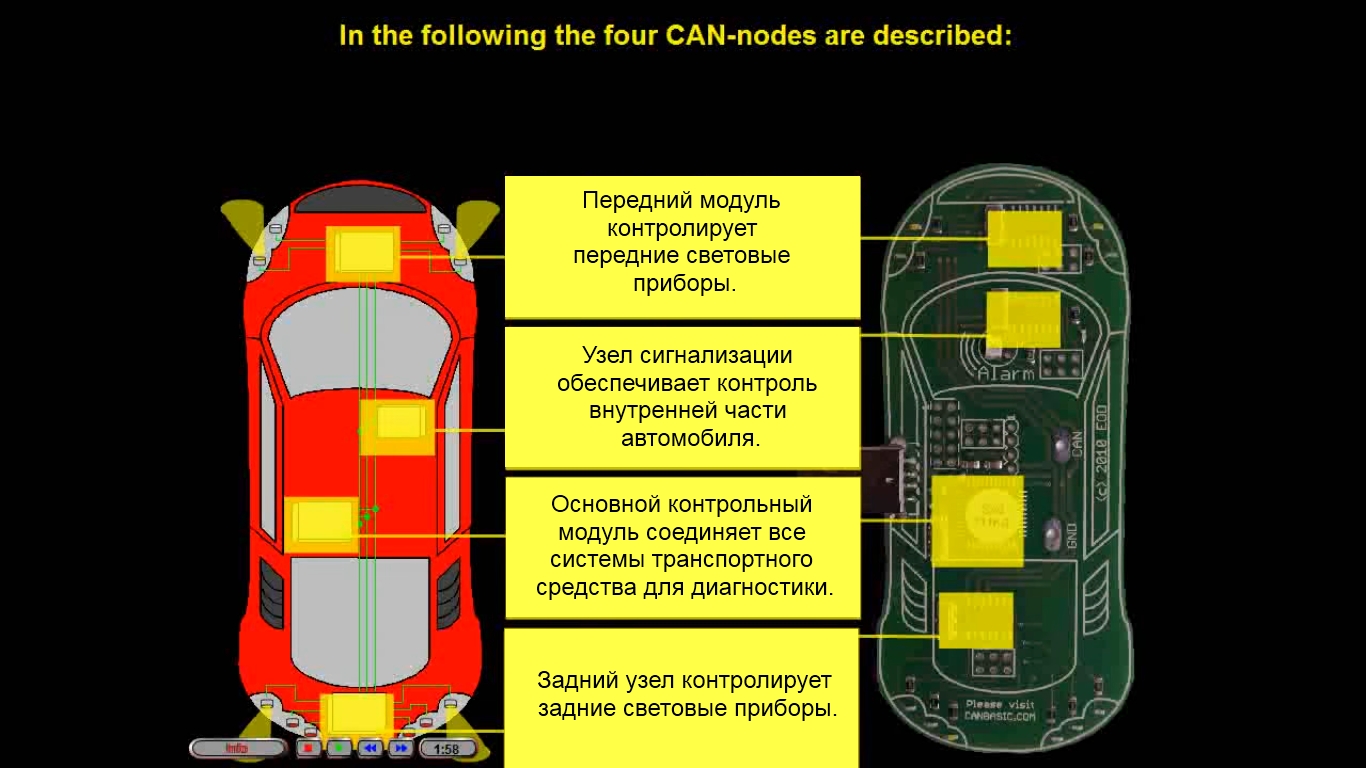
В вышеописанном указано четыре узла шины (CAN-узла).
Передний модуль контролирует передние световые приборы.
Узел сигнализации обеспечивает контроль внутренней части автомобиля.
Основной контрольный модуль соединяет все системы транспортного средства для диагностики.
Задний узел контролирует задние световые приборы.
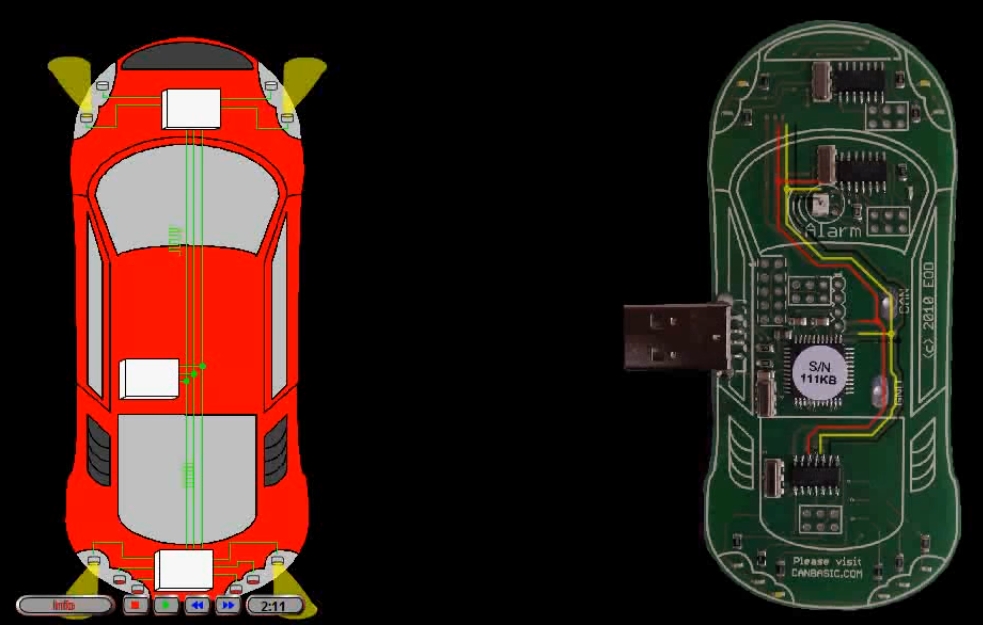
В большинстве транспортных средств для подключения главного модуля управления к ПК с помощью диагностического программного обеспечения вам нужен OBD-USB конвертер.
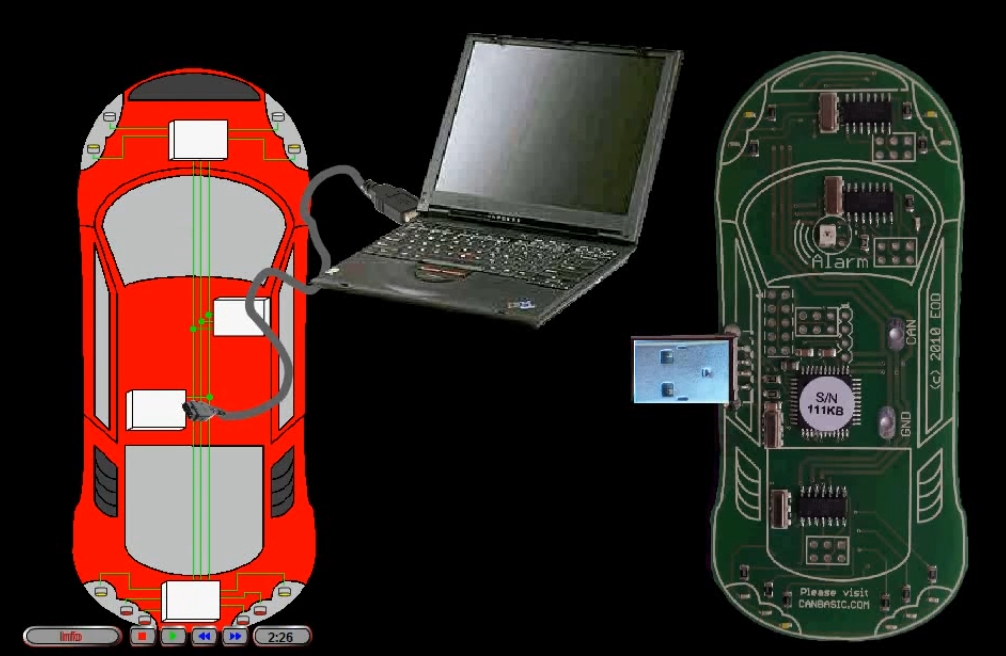
Плата CANBASIC уже содержит в себе OBD-USB конвертер и может быть напрямую подключена к ПК.
Питается плата от интерфейса USB, поэтому дополнительные кабели не нужны.

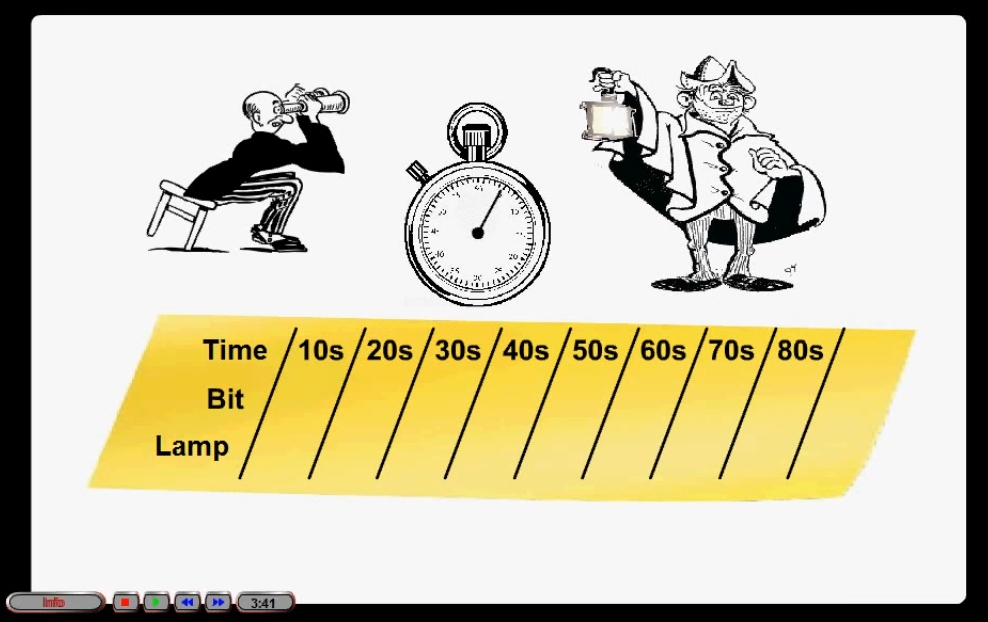
Провода шины используются для передачи множества данных. Как это работает ?
Как работает CAN-шина
Эти данные передаются последовательно. Вот пример.

Для того, чтобы сделать это они договорились, что получатель смотрит за состоянием лампы каждые 10 секунд.
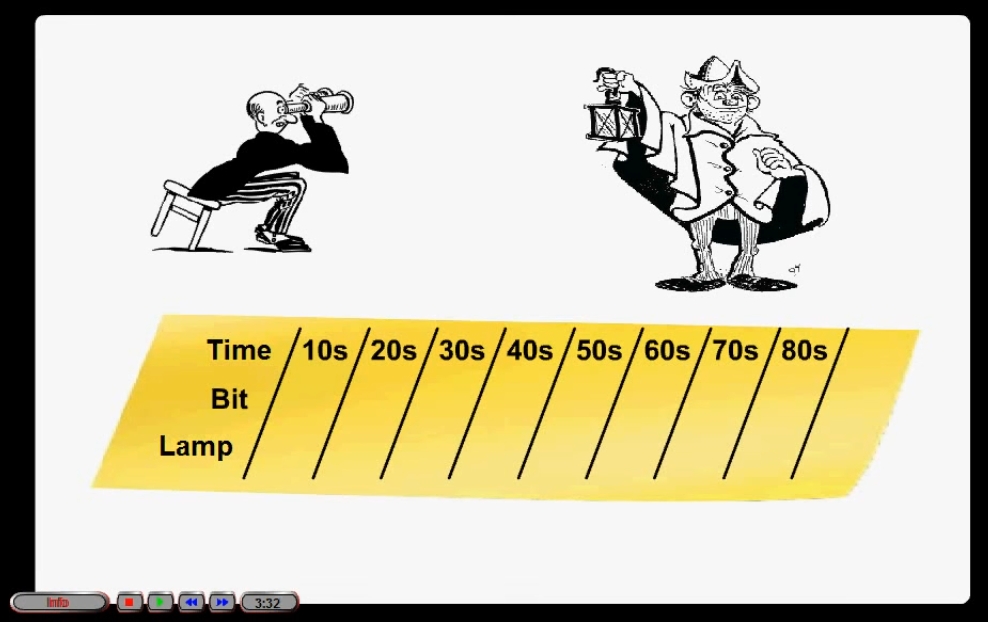
Это выглядит так:


Спустя 80 секунд:
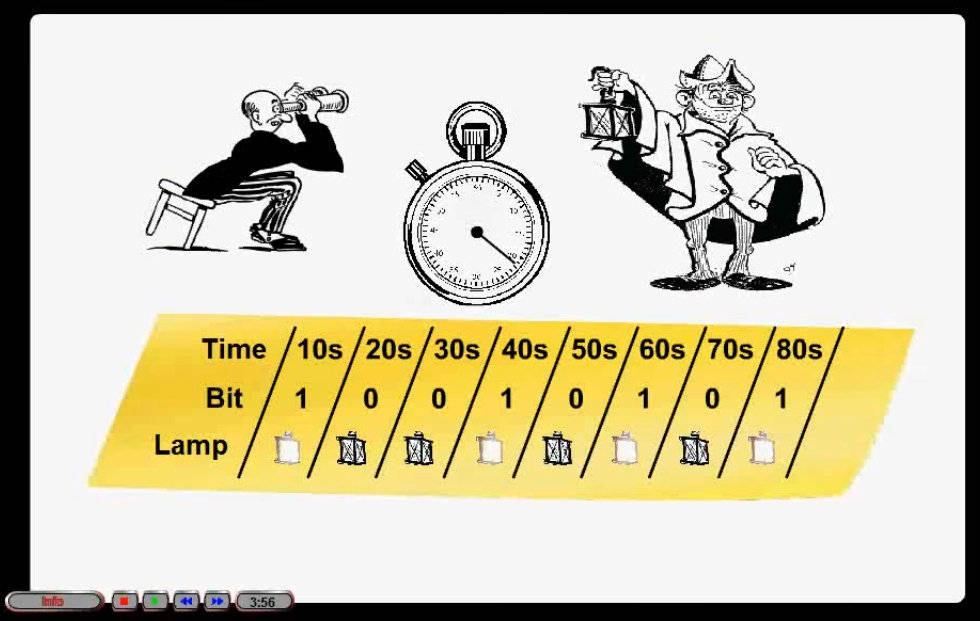
Теперь 8 бит данных были переданы со скоростью 0,1 бит в секунду (т.е. 1 бит в 10 секунд). Это называется последовательной передачей данных.
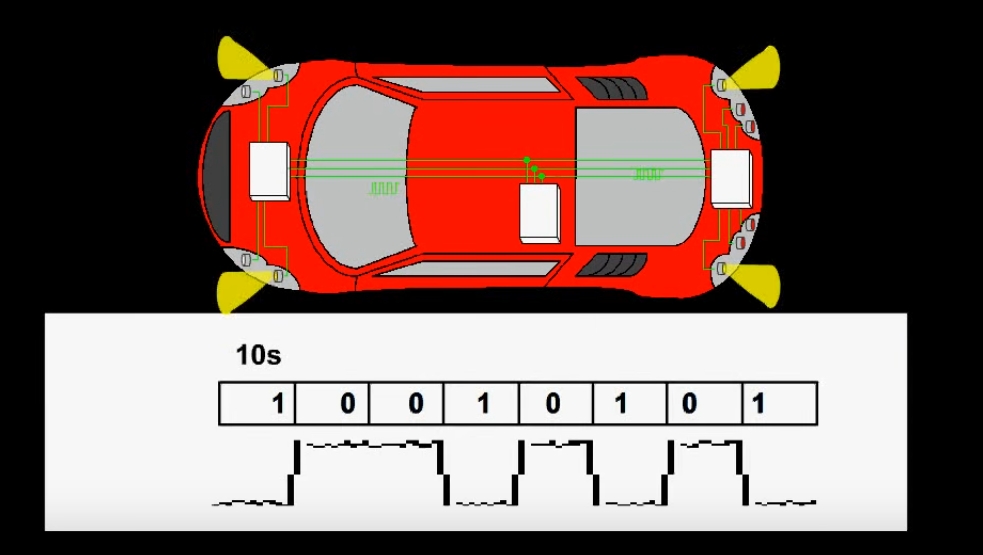
Для использования этого подхода в автомобильном приложении интервал времени сокращается с 10 секунд до 0,000006 секунды. Для передачи информации посредством изменения уровня напряжения на шине данных.

Для измерения электрических сигналов шины КАН используется осциллограф. Две измерительных площадки на плате CANBASIC позволяют измерить этот сигнал.
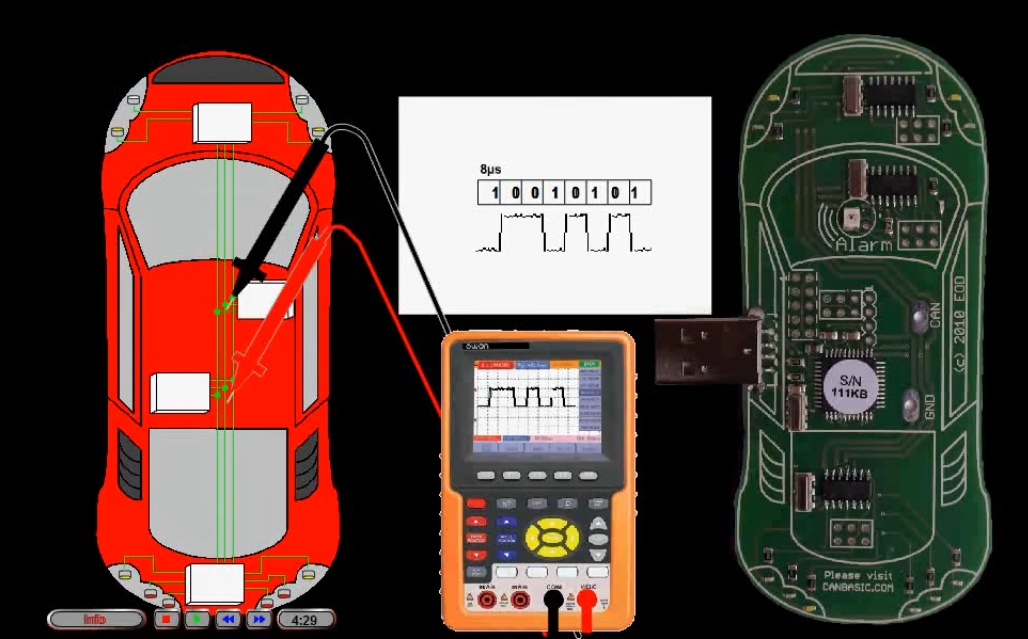
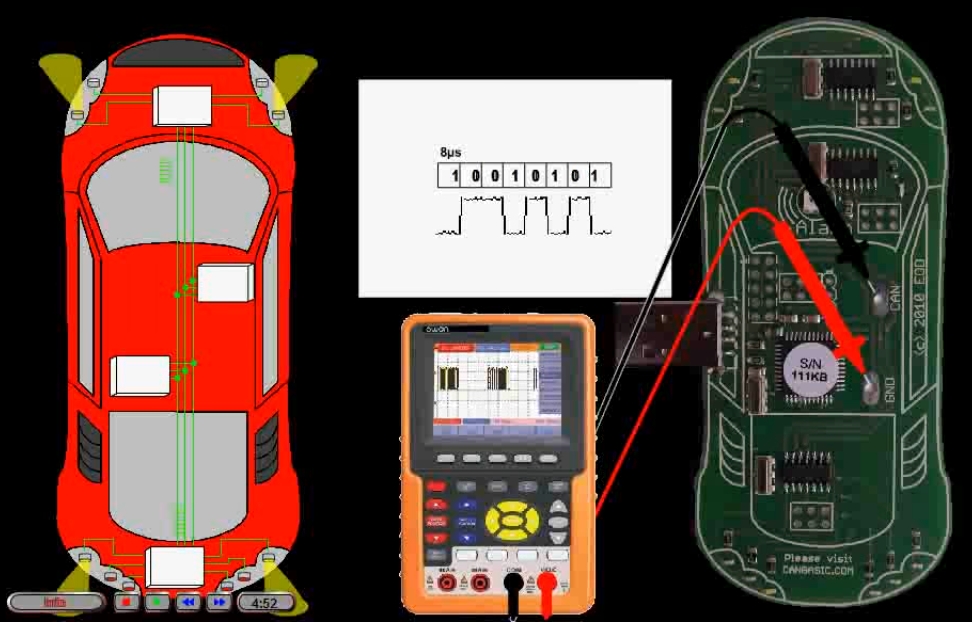
В результате одиночные CAN-биты больше не могут быть распознаны. Для решения этой проблемы CANBASIC-модуль оснащен цифровым запоминающим осциллографом.
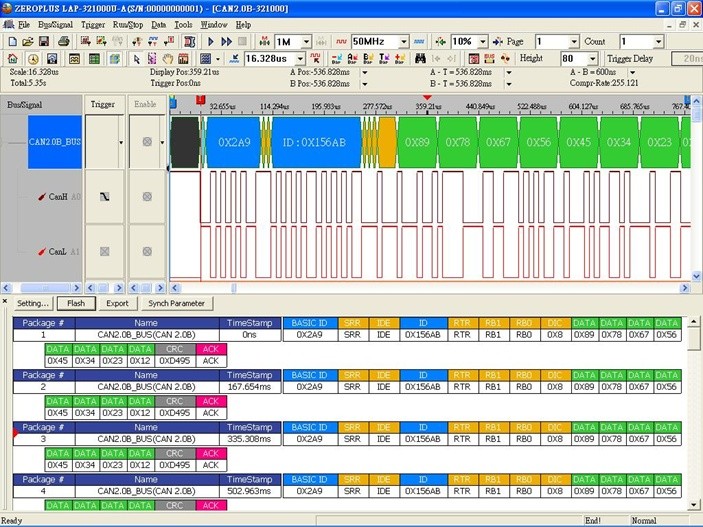
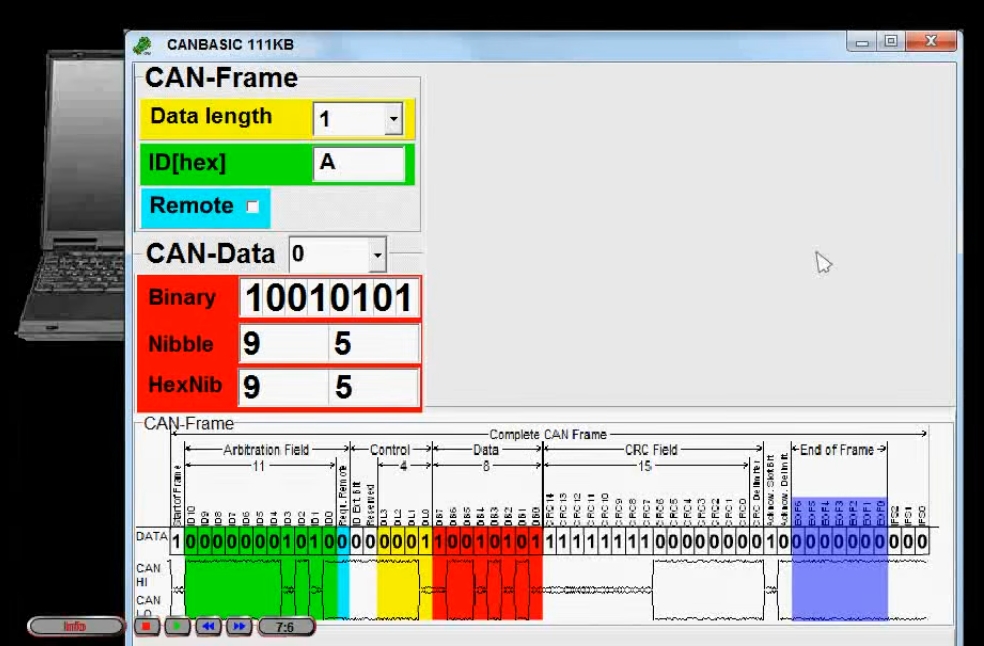
Мы вставляем модуль CANBASIC в свободный разъем USB, после чего он будет автоматически обнаружен. Программное обеспечение CANBASIC можно запустить прямо сейчас.
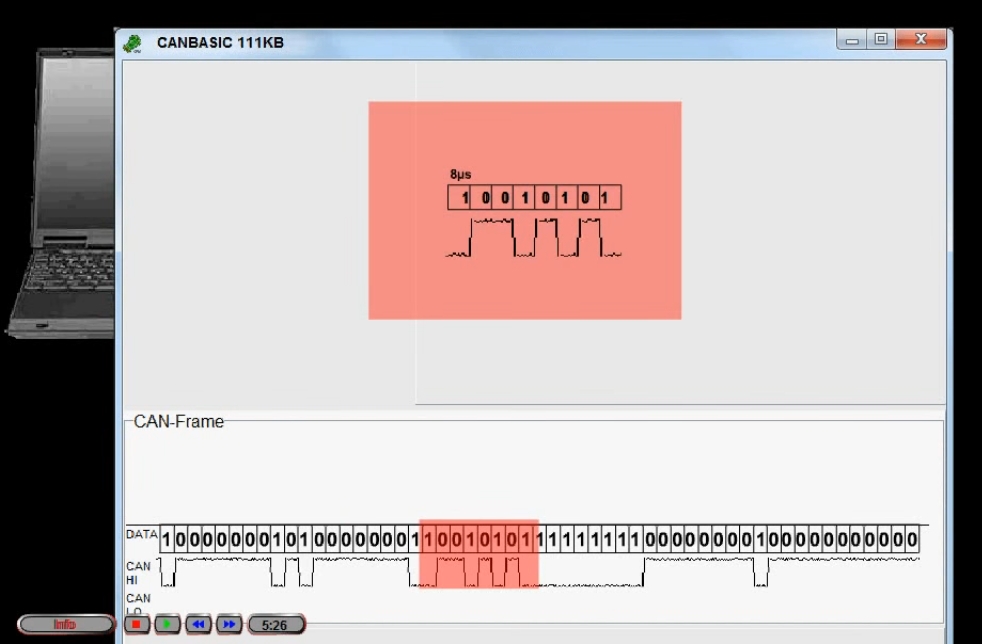
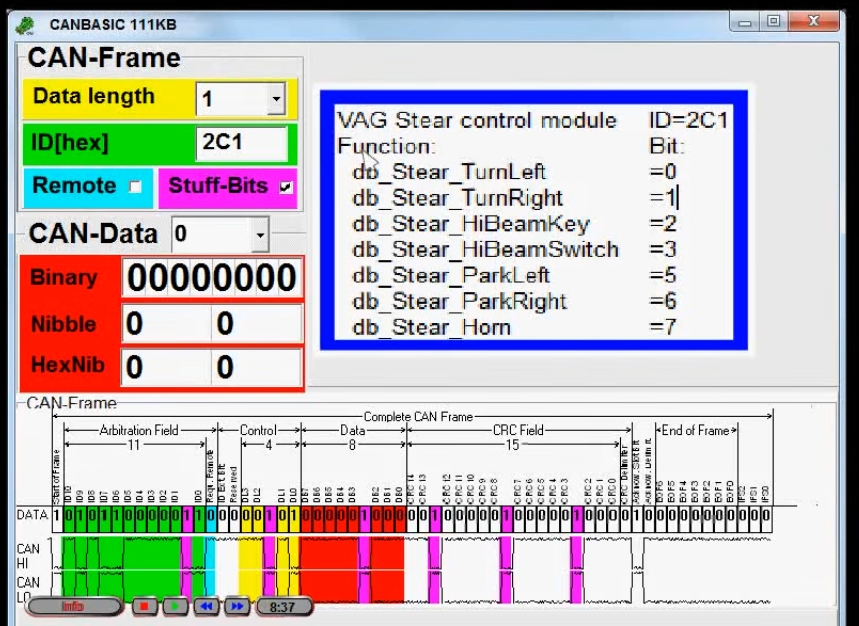
Вы можете видеть вид программного осциллографа с прикрепленными значениями битов. Красным показаны данные, переданные в предыдущем примере.
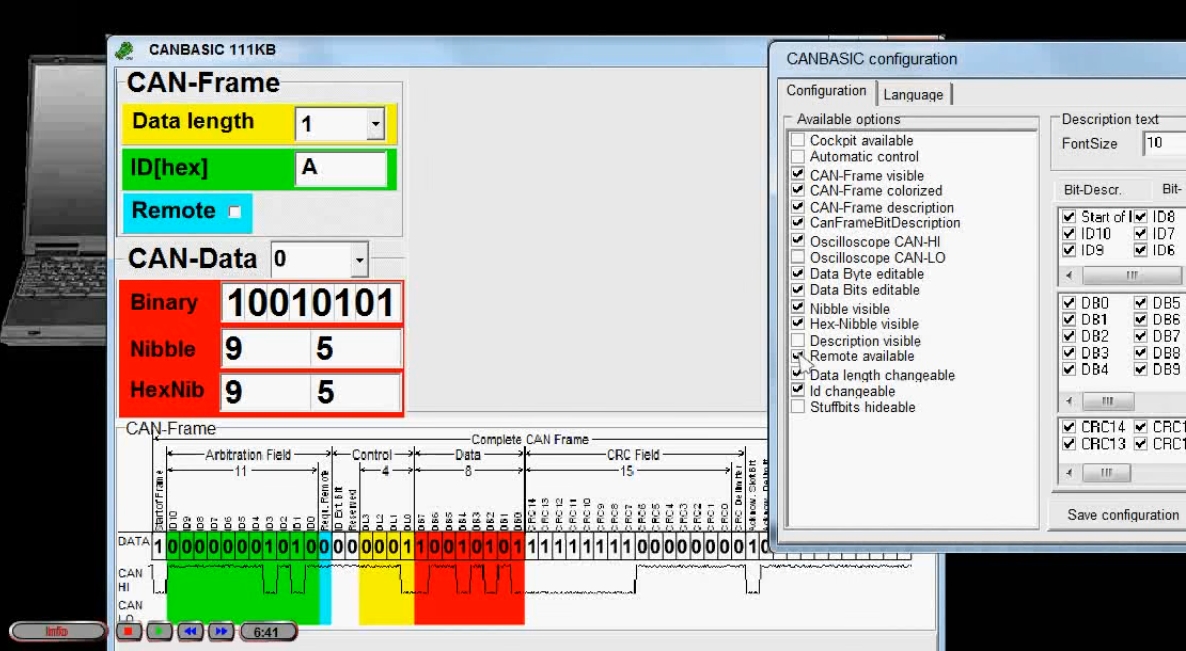
Желтая область определяет количество пользовательских данных. В зеленой зоне может быть установлен уникальный идентификатор.
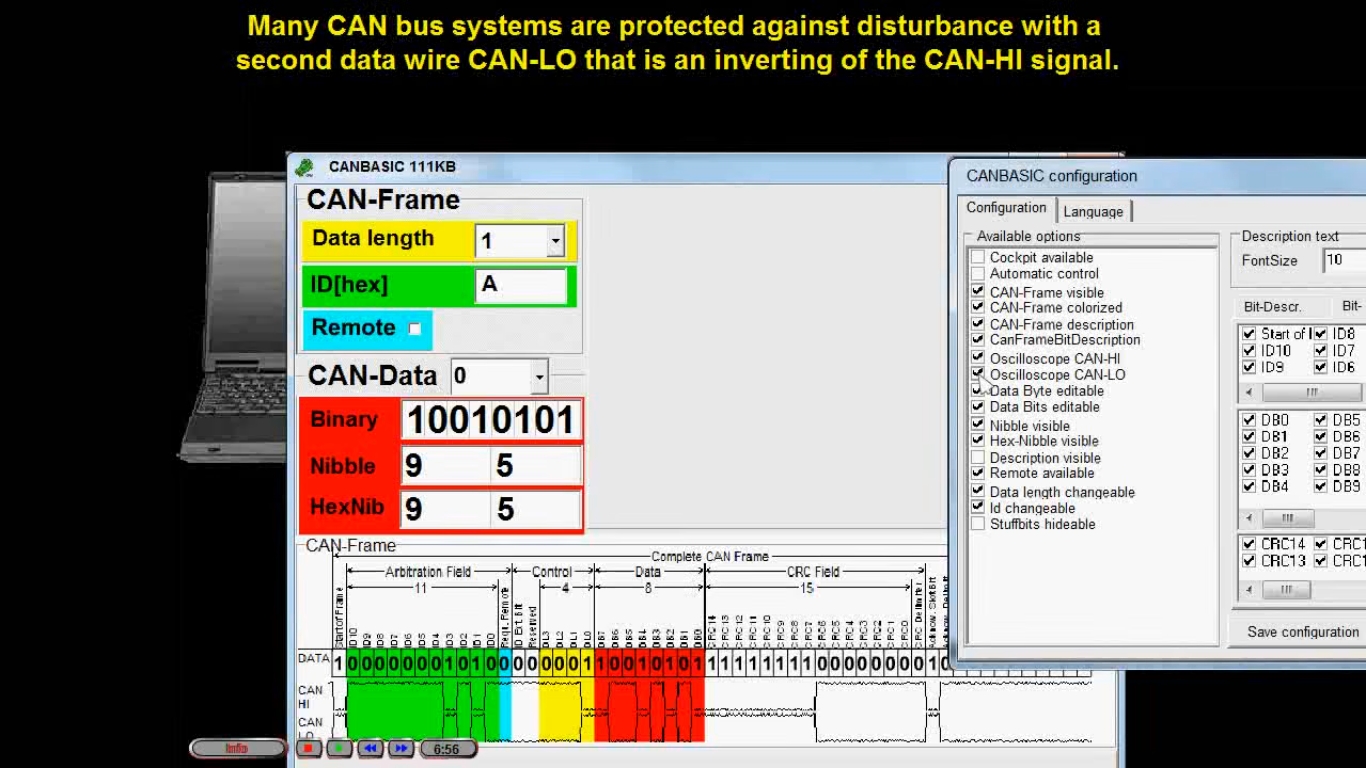
Многие системы с шиной CAN защищены от помех вторым каналом CAN-LO для передачи данных, который является инвертированным относительно сигнала CAN-HI (т.е. идет тот же сигнал, только с обратным знаком).
Шесть последовательных битов с одинаковым уровнем определяют конец CAN-кадра.
Так совпало, что другие части CAN-кадра могут содержать более пяти последовательных битов с одинаковым уровнем.
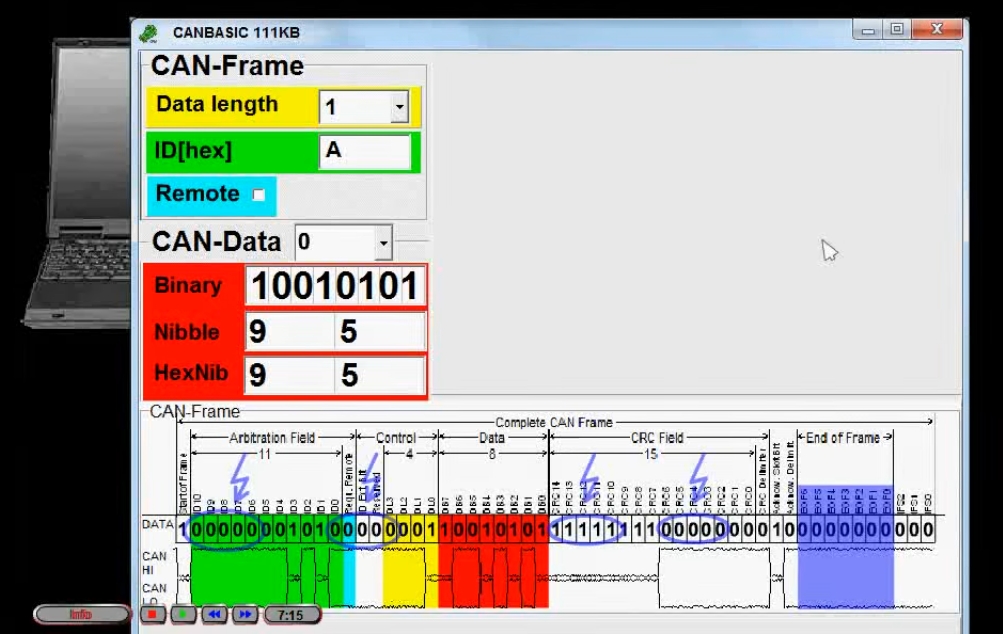
Чтобы избежать этой битовой метки, если появляется пять последовательных битов с одинаковым уровнем, в конце CAN-кадра вставляется противоположный бит. Эти биты называют стафф-битами (мусорными битами). CAN-приемники (получатели сигнала) игнорируют эти биты.
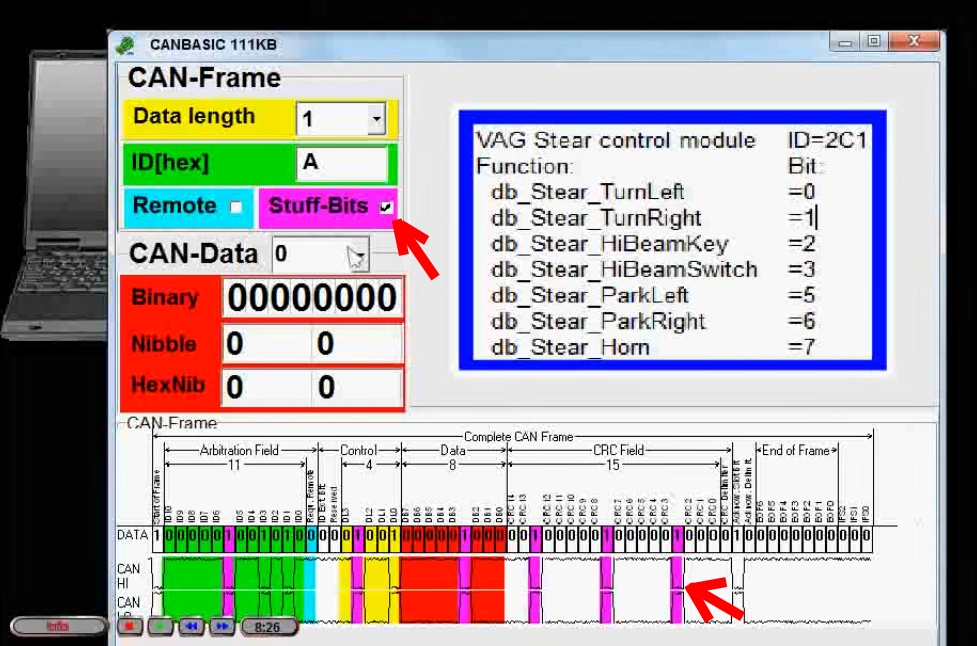
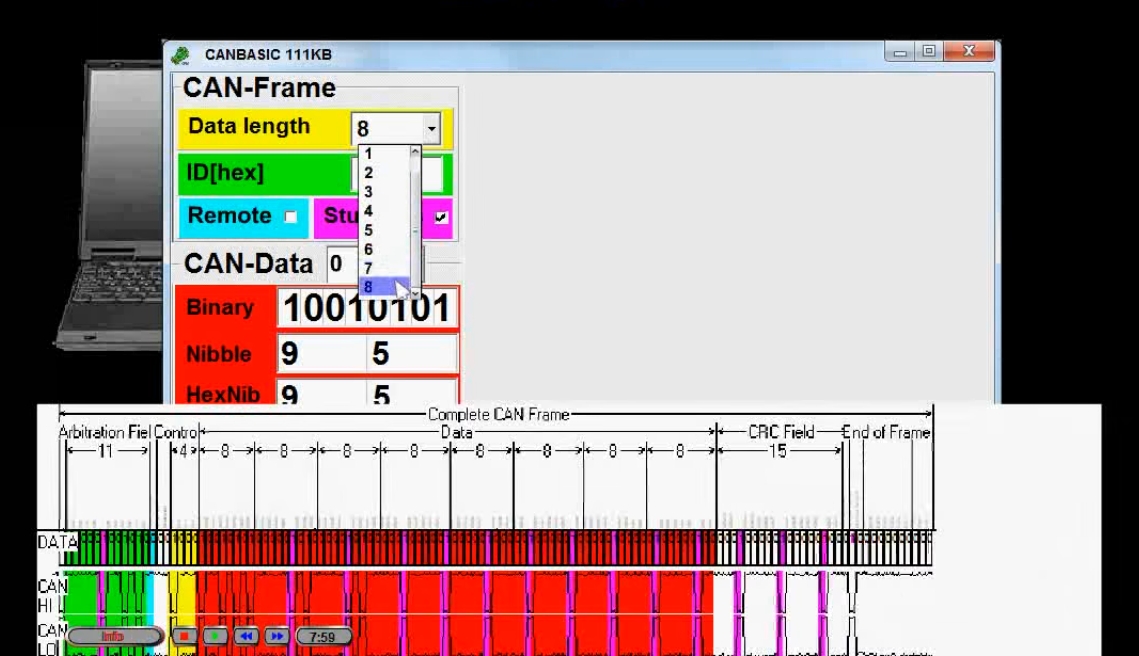
Вставленные данные немедленно обновляются в CAN-кадре, в данном примере длина данных будет изменена с одного байта на 8 байтов и сдвинута назад на один байт.
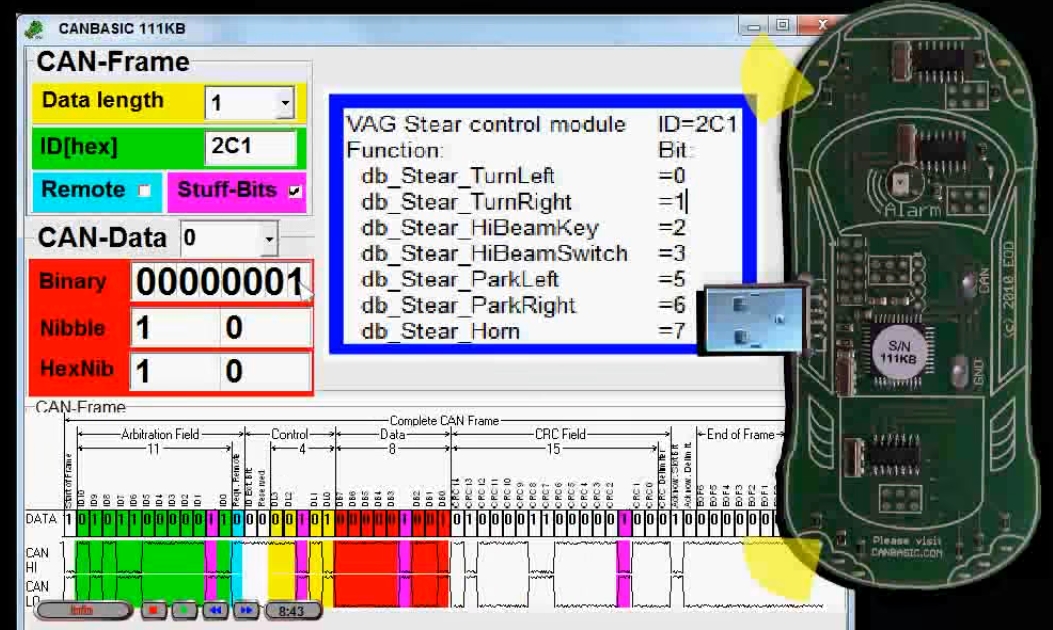
Лампы поворотников могут быть установлены на ближний свет для работы в качестве ДХО. Яркостью будет управлять широтно-импульсная модуляция (ШИМ), в соответствии с возможностями современной диодной техники.
Теперь мы можем активировать фары ближнего света, противотуманные фары, стоп-сигналы и фары дальнего.

С сигнальным узлом вы можете считывать сигнал датчика после инициирующего удаленного запроса.
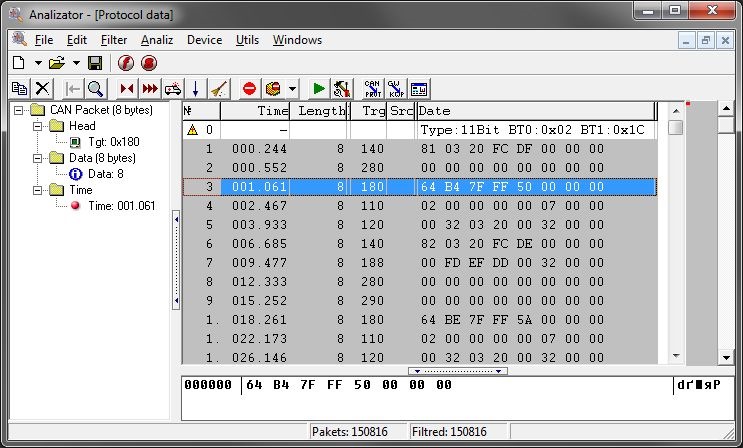
В режиме удаленного запроса второй CAN-кадр будет принят и показан ниже отправленного CAN-кадра.
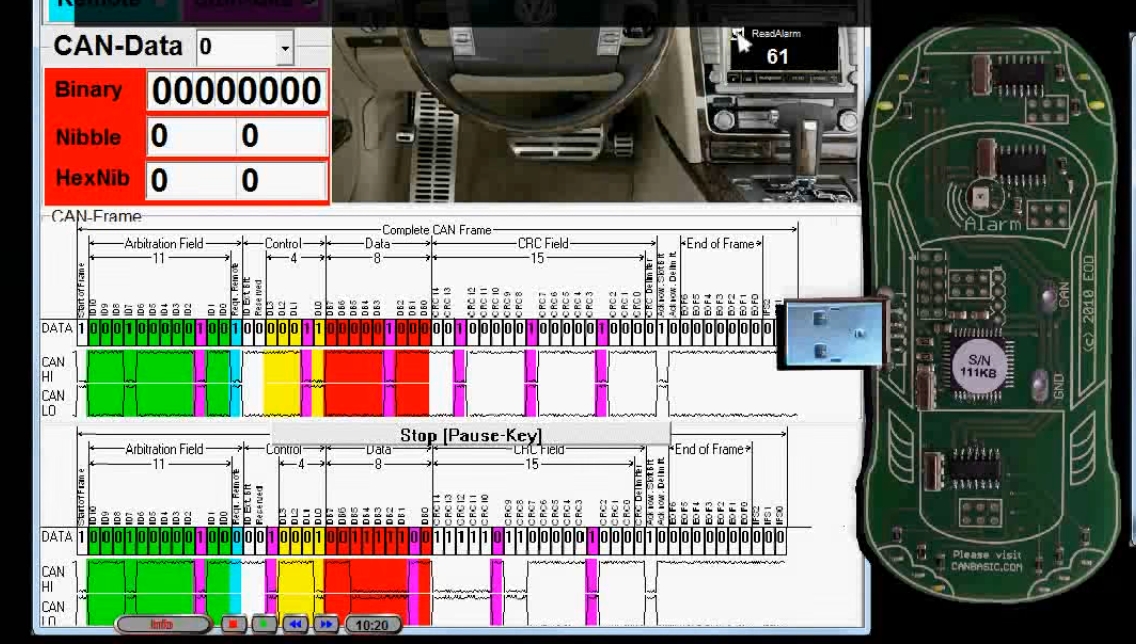
Байт данных CAN теперь содержит результат измерения датчика. С приближением к датчику пальца вы можете изменить измеренное значение.

Клавиша паузы замораживает текущий CAN-кадр и позволяет провести точный анализ.
Как уже было показано, различные части CAN-кадра могут быть скрыты.
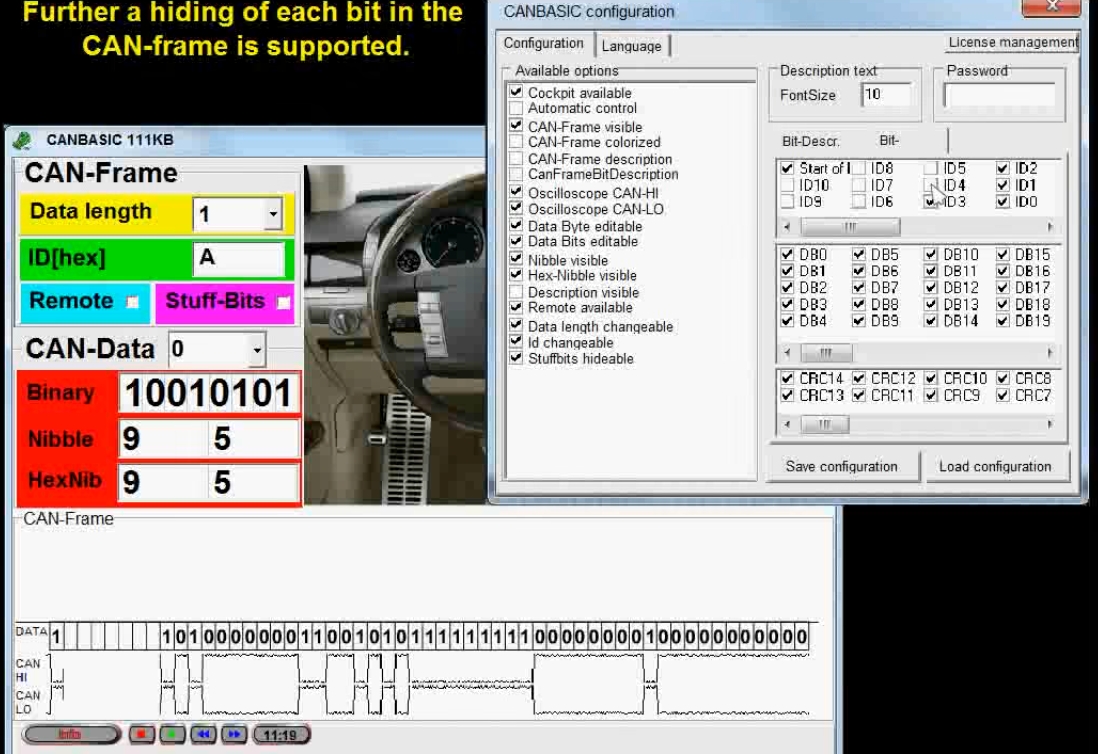
Кроме того поддерживается скрытие каждого бита в КАН-кадре.
Это очень полезно, если вы хотите использовать представление CAN-кадра в ваших собственных документах, например в листе упражнений.
Читайте также: