
Как разобрать рыбий глаз ваз 2112
Обновлено: 04.07.2024
Сейчас мы покажем как снять торпеду и произвести её замену на ВАЗ 2110, 2111, 2112. Эта работа осуществляется своими руками без использования специальных инструментов. Нужны лишь крестовая отвертка, ключи с головкой на 10″ и время на проведение работ.
Основные причины замены передней панели:
- Внешний вид — вы хотите заменить старую, поцарапанную или испорченную панель на новую.
- Шумоизоляция — для этого придется снять торпеду чтобы провести работы по шумо, звуко, вибро изоляции салона.
- Проблема при работе воздуховодов.
Рекомендуем разбирать комплектующие с напарником, а также помечать или запоминать подключения проводов.
Прежде всего нужно отсоединить минусовую клемму от аккумулятора, далее снимаем облицовочный кожух вала рулевого управления, снимаем руль и выключатель зажигания. После этого приступаем к разборке торпеды.
Итак, ниже приведена инструкция по снятию и замене передней панели на ВАЗах 2110, 2111, 2112 на фото.

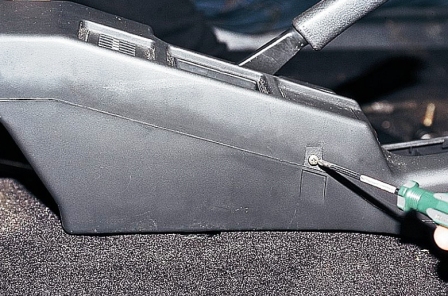
Отвинчиваем 2 самореза справа и 2 слева на центральном тоннеле.

Далее снимаем крышки с обеих сторон.

Снимаем заглушку возле ручника.
Откручиваем шурупы слева и справа центрального тоннеля.

Откручиваем саморезы сзади центрального тоннеля.

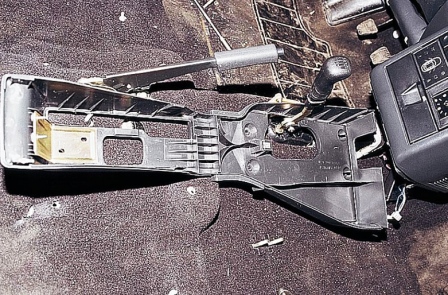
Снятие пластика центрального тоннеля.

Разъединение проводов прикуривателя. Пометьте чтобы не запутаться при подключении на сборке.
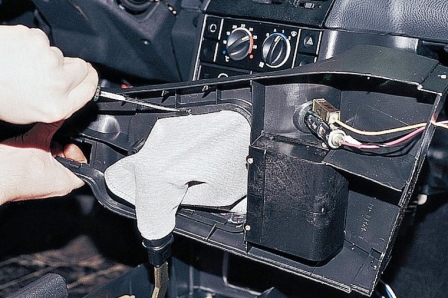
Снимаем чехол ручки кпп.

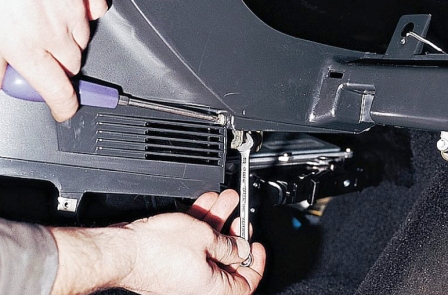
Гаечным ключом откручиваем воздуховод обогрева салона.


Откручиваем крепления центральной панели спереди.

Откручиваем крепления центральной панели сзади.
Окончательно снимаем панель.

Свинчиваем саморезы бардачка.

Осуществляем снятие бардачка.

Отсоединяем провода подсветки бардачка.

Откручиваем шурупы внутри пространства на месте бардачка.

Откручиваем оставшиеся саморезы по сторонам торпеды.
Откручиваем болты торпеды следующим образом как на фото.


Откручиваем гайку на торпеде под воздуховодом.

Спускаем торпеду со шпилек.
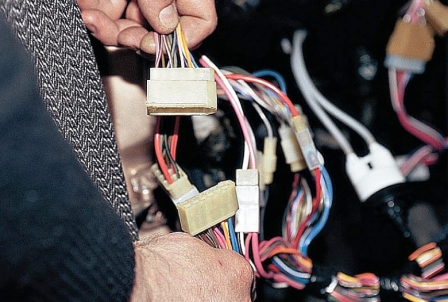
Отсоединяем провода от передней панели, помечаем чтобы не запутаться при сборке.
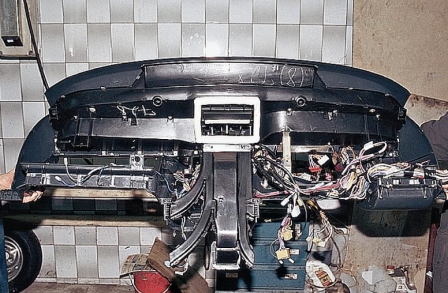
Так выглядит снятая и отключенная торпеда.
Как вы заметили, если действовать по нашей инструкции, то процесс упрощается в разы. Вам по силам осуществить снятие торпеды ВАЗ 2110, 2111, 2112 своими руками, но лучше это делать с помощником.
К настоящему времени фото и видеокамеры с объективами "рыбий глаз" получили очень широкое распространение. Это обусловлено тем, что такое монокоробочное решение в отличие от применения нескольких стационарных или меньшего числа поворотных камер позволяет охватывать область зрения в половину от полного телесного угла (угол обзора 180° по горизонтали и вертикали), а иногда даже и более. В то же время из-за существенных вносимых таким объективом в получаемые изображения или видеокадры геометрических искажений для удобства восприятия получаемой полезной информации приходится использовать цифровую обработку исходных данных, компенсирующую такие искажения. В частности, ставшим уже классическим подходом к решению указанной проблемы является модель Brown–Conrady. Однако до сих пор предлагаются все новые и новые способы решения этой проблемы. И связано это со следующими обстоятельствами. Дело в том, что полная коррекция геометрических искажений сопряжена с соответствующим проецированием изображения со сферической или сфероподобной поверхности на плоскость. А это, в свою очередь, при сохранении пространственного разрешения в центральной области изображения ведет к резкому увеличению размеров "выпрямленного" изображения. Так что приходится это выпрямленное изображение подрезать по периметру и, соответственно, частично терять то даваемое объективом "рыбий глаз" преимущество по полю зрения. И поскольку принципиально невозможно одновременное удовлетворение трех противоречащих друг другу требований (неуменьшение пространственного разрешения изображения, неувеличение размера изображения в пикселях и полная компенсация геометрических искажений), то разработка все более и более сбалансированных моделей является весьма актуальной темой и будет оставаться таковой и в будущем.
Теория и полученные результаты
Рассмотрим одну из таких наиболее часто используемых на практике оптических схем объектива "рыбий глаз", как эквидистантная схема, которая при качественных оптических компонентах имеет лишь радиальную составляющую бочкообразной дисторсии. Её коррекцию в более общей форме по сравнению с классическим представлением в виде степенного ряда по r можно осуществить с помощью равенства
Это равенство однозначно ставит в соответствие значение яркости пикселя для выровненного монохромного изображения (или три значения яркости для выровненного цветного изображения), характеризуемого (характеризуемых) отсчитываемым от центра изображения радиус-вектором rp = (xp, yp), со значением яркости пикселя (значениями яркости пикселей) для исходного изображения, которое характеризуется (которые характеризуются) отсчитываемым от центра изображения радиус-вектором rs = (xs, ys). То есть, равенство (1) с помощью функции f задает правило пересчета принадлежащих плоскости пикселей с координатами rp через принадлежащие полусфере пиксели с соответствующими координатами rs.
Для рассматриваемой оптической схемы можно получить строгое аналитическое выражение для функции f. Оно имеет следующий вид:
Здесь R0 = 2r0, r0 (R0) – это радиус (в пикселях), отвечающий углу pi / 4 (pi / 2) радиан на исходном изображении относительно оси симметрии объектива. Этот параметр уникален для каждой конкретной оптической системы. Равенство (2), очевидно, может быть разложено в ряд Тейлора с оставлением нескольких членов ряда и перенормировкой коэффициентов перед ними для представления функции f в стандартном по модели Brown–Conrady виде. Однако далее будет рассматриваться именно точное выражение для функции f.

Рисунок 1 – Функция преобразования координат из rp в rs согласно равенству (2) при R0 = 1
Согласно рис.1 при условии сохранения исходного пространственного разрешения (здесь и далее имеется ввиду центральная часть изображения) и его размеров после коррекции дисторсии угол обзора оптической системы со 180° сужается до 115° (см. результат на рис.2).

Рисунок 2 – Полная коррекция дисторсии согласно равенству (2) для rp
Если же увеличить размер выходного изображения по площади вчетверо при сохранении пространственного разрешения, то угол обзора оптической системы увеличится до 145°. Однако дальнейшее значительное увеличение размеров изображения не приводит к существенному увеличению угла обзора. Чтобы разрешить указанное противоречие необходимо модифицировать функцию f в F так, чтобы, с одной стороны, она была максимально близка к исходной в окрестности нуля по rs, а с другой стороны, для минимизации вторичных искажений была максимально линейной в окрестности единицы по rs. Таким требованиям, в частности, очень хорошо удовлетворяет функция F в виде
Хотя использование равенства (3) вместо равенства (2) при увеличении площади изображения вчетверо и сохранении пространственного разрешения или при сохранении размеров изображения и уменьшения вдвое пространственного разрешения позволяет зафиксировать широкий угол обзора (180°), в то же время, такая модификация функции f не устраняет бочкообразную дисторсию периферической части изображения (см. рис.3).

Рисунок 3 – Неполная коррекция дисторсии согласно равенству (3) для rp
Чтобы устранить бочкообразную дисторсию периферической части изображения может быть использована существенно нелинейная по r деформация окружностей в квадраты со сглаженными углами в разной степени в зависимости от r (в идеале, по внешнему периметру изображения окружность должна деформироваться в квадрат). Далее приведены выражения, с помощью которых можно осуществлять соответствующую попиксельную трансформацию
Для окончательной коррекции остаточной дисторсии к полученному с помощью равенства (5) промежуточному результату ещё необходимо применить равенства (1) и (3) в виде
Ниже на рисунках представлены результаты последовательных трансформаций изображений согласно равенствам (5) и (8) с учетом равенств (3), (4), (6) и (7).
Рисунок 4 – Коррекция дисторсии первого изображения Рисунок 5 – Коррекция дисторсии второго изображения
Как видно из этих рисунков, при сохранении пространственного разрешения с увеличением площади исходного изображения всего вчетверо, а также сохранении широкого угла обзора (180°) бочкообразная дисторсия весьма эффективно подавляется по всему полю изображения.
Черные области на всех представленных изображениях отвечают переходам между rs и rp, когда вычисляемый вектор rs лежит за пределами исходного изображения.
Технология Fish eye зачастую используется на объектах большого размера, где необходимо производить:
Если говорить об актуальности подобного оборудования, то она не ограничивается вышеперечисленными вариантами. Станет незаменимым помощником на всех объектах большого размера, где нужен полный контроль и невысокие требования к детализации.
Но, если вы хотите достигнуть высокого качества, важным является не стандартное разрешение изображения, а разрешение матрицы. По факту количество пикселей оказывается значительно меньше, чем заявляет об этом производитель. Если в характеристиках оборудования вы увидите, что матрица на 5 мегапикселей, то фактически там будет 3 мегапикселя.
- в полной мере раскрывают потенциал плотности матрицы – вместо круглой картинки, пользователь получает эллиптическую;
- получают значительно больше плотности пикселя в крайних частях изображения, в результате чего визуально увеличиваются удаленные от края объекта, а центральная часть уменьшается.
В камерах используется специальное программное обеспечение, благодаря чему вы получите не шарообразную картинку, а стандартную картинку, разделенную на несколько составляющих. Это способствует тому, что рядовой пользователь не заметит разницы и не будут испытывать дискомфорта при использовании такой камеры.
- работа в формате 4 независимых камер – создается имитация, что работает одновременно 4 камеры, направленные в разные стороны. При помощи программного обеспечения происходит склеивание изображений;
- просмотр в классическом формате в виде купольного изображения, который находится в черном прямоугольнике, что не всегда является удобным.
Лучшие камеры рыбий глаз
Панорамная камера обеспечивают обзор 180°. Оснащена объективом 5МП WizMind Fisheye; матрицей 1/2.7" CMOS, а также, имеет встроенный микрофон; слот для Micro SD карты, емкостью до 256 Гб; защиту корпуса IP67, и и вандалозащиту IK10
HDCVI Fisheye видеокамера имеет матрицу 5Мп 1/2.8" CMOS; чувствительность 0.005 лк/ F2.0 (цвет), 30 IRE, 0 лк с ИК; Объектив (рыбий глаз) с фокусным расстоянием f=1.4 мм, угол обзора 180°; ИК подсветка - до 10 м.
Камера видеонаблюдения с технологией рыбий глаз обеспечивают обзор 180°. Матрица: 1/2.5" progressive scan CMOS; Сжатие видео: Н.265 / Н.265+ / H.264 / H.264+ / MJPEG; Объектив с фокусным расстоянием f=1.05 мм; Чувствительность: 0.01 Люкс/F1.2 (AGC вкл), 0 Люкс с ИК; Запись: 5Мп/3Мп/1.3Мп - 25 к/с
Заключение
К настоящему времени фото и видеокамеры с объективами "рыбий глаз" получили очень широкое распространение. Это обусловлено тем, что такое монокоробочное решение в отличие от применения нескольких стационарных или меньшего числа поворотных камер позволяет охватывать область зрения в половину от полного телесного угла (угол обзора 180° по горизонтали и вертикали), а иногда даже и более. В то же время из-за существенных вносимых таким объективом в получаемые изображения или видеокадры геометрических искажений для удобства восприятия получаемой полезной информации приходится использовать цифровую обработку исходных данных, компенсирующую такие искажения. В частности, ставшим уже классическим подходом к решению указанной проблемы является модель Brown–Conrady. Однако до сих пор предлагаются все новые и новые способы решения этой проблемы. И связано это со следующими обстоятельствами. Дело в том, что полная коррекция геометрических искажений сопряжена с соответствующим проецированием изображения со сферической или сфероподобной поверхности на плоскость. А это, в свою очередь, при сохранении пространственного разрешения в центральной области изображения ведет к резкому увеличению размеров "выпрямленного" изображения. Так что приходится это выпрямленное изображение подрезать по периметру и, соответственно, частично терять то даваемое объективом "рыбий глаз" преимущество по полю зрения. И поскольку принципиально невозможно одновременное удовлетворение трех противоречащих друг другу требований (неуменьшение пространственного разрешения изображения, неувеличение размера изображения в пикселях и полная компенсация геометрических искажений), то разработка все более и более сбалансированных моделей является весьма актуальной темой и будет оставаться таковой и в будущем.
Теория и полученные результаты
Рассмотрим одну из таких наиболее часто используемых на практике оптических схем объектива "рыбий глаз", как эквидистантная схема, которая при качественных оптических компонентах имеет лишь радиальную составляющую бочкообразной дисторсии. Её коррекцию в более общей форме по сравнению с классическим представлением в виде степенного ряда по r можно осуществить с помощью равенства
Это равенство однозначно ставит в соответствие значение яркости пикселя для выровненного монохромного изображения (или три значения яркости для выровненного цветного изображения), характеризуемого (характеризуемых) отсчитываемым от центра изображения радиус-вектором rp = (xp, yp), со значением яркости пикселя (значениями яркости пикселей) для исходного изображения, которое характеризуется (которые характеризуются) отсчитываемым от центра изображения радиус-вектором rs = (xs, ys). То есть, равенство (1) с помощью функции f задает правило пересчета принадлежащих плоскости пикселей с координатами rp через принадлежащие полусфере пиксели с соответствующими координатами rs.
Для рассматриваемой оптической схемы можно получить строгое аналитическое выражение для функции f. Оно имеет следующий вид:
Здесь R0 = 2r0, r0 (R0) – это радиус (в пикселях), отвечающий углу pi / 4 (pi / 2) радиан на исходном изображении относительно оси симметрии объектива. Этот параметр уникален для каждой конкретной оптической системы. Равенство (2), очевидно, может быть разложено в ряд Тейлора с оставлением нескольких членов ряда и перенормировкой коэффициентов перед ними для представления функции f в стандартном по модели Brown–Conrady виде. Однако далее будет рассматриваться именно точное выражение для функции f.
Рисунок 1 – Функция преобразования координат из rp в rs согласно равенству (2) при R0 = 1
Согласно рис.1 при условии сохранения исходного пространственного разрешения (здесь и далее имеется ввиду центральная часть изображения) и его размеров после коррекции дисторсии угол обзора оптической системы со 180° сужается до 115° (см. результат на рис.2).
Рисунок 2 – Полная коррекция дисторсии согласно равенству (2) для rp
Если же увеличить размер выходного изображения по площади вчетверо при сохранении пространственного разрешения, то угол обзора оптической системы увеличится до 145°. Однако дальнейшее значительное увеличение размеров изображения не приводит к существенному увеличению угла обзора. Чтобы разрешить указанное противоречие необходимо модифицировать функцию f в F так, чтобы, с одной стороны, она была максимально близка к исходной в окрестности нуля по rs, а с другой стороны, для минимизации вторичных искажений была максимально линейной в окрестности единицы по rs. Таким требованиям, в частности, очень хорошо удовлетворяет функция F в виде
Хотя использование равенства (3) вместо равенства (2) при увеличении площади изображения вчетверо и сохранении пространственного разрешения или при сохранении размеров изображения и уменьшения вдвое пространственного разрешения позволяет зафиксировать широкий угол обзора (180°), в то же время, такая модификация функции f не устраняет бочкообразную дисторсию периферической части изображения (см. рис.3).
Рисунок 3 – Неполная коррекция дисторсии согласно равенству (3) для rp
Чтобы устранить бочкообразную дисторсию периферической части изображения может быть использована существенно нелинейная по r деформация окружностей в квадраты со сглаженными углами в разной степени в зависимости от r (в идеале, по внешнему периметру изображения окружность должна деформироваться в квадрат). Далее приведены выражения, с помощью которых можно осуществлять соответствующую попиксельную трансформацию
Для окончательной коррекции остаточной дисторсии к полученному с помощью равенства (5) промежуточному результату ещё необходимо применить равенства (1) и (3) в виде
Ниже на рисунках представлены результаты последовательных трансформаций изображений согласно равенствам (5) и (8) с учетом равенств (3), (4), (6) и (7).
Рисунок 4 – Коррекция дисторсии первого изображения Рисунок 5 – Коррекция дисторсии второго изображения
Как видно из этих рисунков, при сохранении пространственного разрешения с увеличением площади исходного изображения всего вчетверо, а также сохранении широкого угла обзора (180°) бочкообразная дисторсия весьма эффективно подавляется по всему полю изображения.
Черные области на всех представленных изображениях отвечают переходам между rs и rp, когда вычисляемый вектор rs лежит за пределами исходного изображения.
Читайте также: