
Как определить значение силы тяги на ведущих колесах автомобиля
Обновлено: 30.06.2024
Этот тракторный параметр не вписывают в технические характеристики автомобиля, заменяя его лукавым градусом преодолеваемого подъема. На первый взгляд этого достаточно — землю на машине не пахать. Зато для буксировки прицепа или вызволения застрявшего автомобиля тяговая сила тягача едва ли не самое главное.
Каковы же реальные тяговые возможности легковых автомобилей в разных дорожных условиях? Зная их, легко определить допустимую загрузку машины и вес прицепа для любого маршрута и состояния дороги. Особенно актуально это зимой, когда под колесами промерзший асфальт, гололед и укатанный снег.
Мы проверили динамометром развиваемое автомобилями усилие на разных покрытиях. Среди подопытных — представители разных классов: задне-, передне- и полноприводные, мини-вэн и фургон. Результаты эксперимента приведены в таблице, а к ним — наши комментарии.
СИЛЬНЫЙ, НО ЛЕГКИЙ
В абсолютных чемпионах по развиваемой тяге, конечно же, полноприводники. Достаточно мощный двигатель, понижающий ряд в трансмиссии, блокировка мостов и стопроцентная реализация сцепного веса позволяют развить тягу, почти равную фактическому весу машины. Почти — потому, что у обычных шин даже на отличном сухом и чистом асфальте коэффициент сцепления около 0,9. На практике же он редко превышает 0,8. Укатанный снег в морозы дает около 0,4, а в оттепель лишь немного превосходит гололед.
Буксование на снегу очень быстро приводит к образованию обледенелой лунки, выбраться из которой без пары лопат песка будет невозможно.
Буксование на снегу очень быстро приводит к образованию обледенелой лунки, выбраться из которой без пары лопат песка будет невозможно.
Передне- и заднеприводные автомобили по-разному проявляют свои особенности тяги. На первые почти не влияет их загрузка, разве что передний пассажир может добавить немного сцепного веса. Зато вторые, особенно при достаточной мощности двигателя, лучший результат показывают с пассажирами на заднем сиденье и загруженным багажником — весь дополнительный вес идет на ведущие колеса.
Отсюда еще один вывод: если застряли на переднеприводной машине, выбираться своим ходом лучше на пустой. У классической больше шансов, если загрузить багажник. Выталкивать же и ту, и другую руками легче, разумеется, пустую.
Однако если на ровной дороге наибольшую тягу развивает груженая машина, то на подъеме лишний вес только во вред, особенно для переднеприводного автомобиля. В первом приближении на подъеме в 10% каждая тонна собственного веса машины вычитает из тяги 100 кгс. А если еще прицеп сзади, что останется на преодоление подъема?
Отметим, максимальная тяга развивается перед самым срывом колес в буксование (если, конечно, на них приходит достаточный момент). Разница весьма существенная, особенно на снегу, когда буксующие колеса успевают растопить снег и выбрать под собой лунки с обледенелыми краями. Из них без пары лопат песка уже не выберешься.
где Мj- крутящий момент двигателя, кгс м ( М1, ММ, М2, МN,);ki - передаточное число коробки передач (КП) на i-той передаче;P2 - передаточное число раздаточной коробки (РК) на 2-ой передаче;o - передаточное число главной передачи;k - радиус качения колеса, м;
ηm - КПД трансмиссии;
(i,j) - порядковые номера передач в КП и крутящего момента
Для полноприводного автомобиля можно принять ηm = 0,85
Если выражение (4) преобразовать, то получим
Сила тяги на ведущих колесах на первой передаче в КП и второй передаче в РК при устойчивой минимальной частоте вращения коленчатого вала двигателя n1 составит:
Данные расчета на остальных передачах КП (2-й передаче в РК) и частотах вращения коленчатого вала (nм, n2, nN) производится по выражению (4а) и вносится в таблицу 3.
Определить величину силы тяги на ведущих колесах при различных передачах в КП, частоте вращения коленчатого вала двигателя и первой передаче в РК по формуле
где iP1 - передаточное число раздаточной коробки (РК) на 1-ой передаче;
Сила тяги на ведущих колесах на первой передаче в КП и первой передаче в РК при минимальной устойчивой частоте вращения коленчатого вала двигателя n1 составит:
Данные расчета на остальных передачах КП (1-й передаче в РК) и частотах вращения коленчатого вала (nм, n2, nN) производится по выражению (4б) и вносится в таблицу 3.
Расчет скоростей движения автомобиля на передачах
Скорости движения автомобиля на i-х передачах в КП и второй передаче в РК (Vi) определяются по формуле
При n1 на первой передаче в КП получим
Все данные расчета заносятся в табл. 4.
Подобным образом рассчитаем скорости на первой передаче в КП и первой передаче в РК при различных частотах вращения коленчатого вала (n1, nм, n2, nN)

(5а)
Остальные данные заносятся в табл. 4.
Расчет силы сопротивления воздуха
Так как сопротивление воздуха проявляется при скоростях более 30 км/ч, то расчет выполним для 2-х высших передач в КП и второй передачи в РК.

(6)
где Vi - скорость движения, км/ч;w - коэффициент обтекаемости (лобового сопротивления) ;
В- ширина автомобиля, м;
Н- высота автомобиля, м,
Можно принять для грузового автомобиля
Определение значений динамического фактора

На низших передачах Рw = 0.
На первой передаче в КП и второй - в РК при частоте вращения коленчатого вала n1 получим

(7)
Расчеты для остальных передач и частот вращения коленчатого вала, заносим в табл. 6.
При включенной первой передаче в РК и первой передаче в КП получим

(7а)
ЗАКЛЮЧЕНИЕ
В данной работе были рассмотрены технические характеристики автомобиля Урал-5323. На их основе был произведен расчет тягово-скоростных свойств. Полученные данные сведены к табличному виду в приложении к работе. Так же был построена диаграмма зависимости динамического фактора от скорости автомобиля. Используя эту диаграмму и зная условия дорожного покрытия (коэффициент сопротивления качению) можно найти скорость движения в данных условиях на определенной передаче.
Приложение
Таблица 1 Результаты расчетов
| a | b | c | n i | n max | Ni/nmax | Ni | Mi |
| 0,53 | 1,56 | 1,09 | 900 | 3200 | 0,0116 | 37,2317 | 395,07 |
| 1900 | 0,0219 | 70,0139 | 351,912 | ||||
| 2500 | 0,0291 | 93,1104 | 355,682 | ||||
| 3200 | 0,0344 | 110 | 328,281 |
Таблица 2 определение свободного радиуса колеса
| r0 | rк |
| 0,5588 | 0,53086 |
Таблица 3 определение силы тяги на колесе
| n i500 | n i1100 | n i1500 | n i2100 | |
| Рк 1;1 | 70551,36 | 62844,23 | 63517,49 | 58624,31 |
| Рк 2;1 | 50380,79 | 44877,12 | 45357,9 | 41863,67 |
| Рк 3;1 | 35960,2 | 32031,86 | 32375,02 | 29880,95 |
| Рк 4;1 | 25555,47 | 22763,76 | 23007,63 | 21235,19 |
| Рк 5;1 | 9126,955 | 8129,913 | 8217,01 | 7583,998 |
| Рк 1;2 | 33595,89 | 29925,82 | 30246,42 | 27916,34 |
| Рк 2;2 | 23990,85 | 21370,06 | 21599 | 19935,08 |
| Рк 3;2 | 17123,91 | 15253,26 | 15416,68 | 14229,03 |
Таблица 4 определение скорости движения
| 900 | 1900 | 2500 | 3200 | |
| Vк 1;1 | 1,47565 | 3,1153 | 4,099 | 5,2467 |
| Vк 2;1 | 2,06644 | 4,3625 | 5,7401 | 7,3473 |
| Vк 3;1 | 2,89511 | 6,1119 | 8,042 | 10,294 |
| Vк 4;1 | 4,07383 | 8,6003 | 11,316 | 14,485 |
| Vк 5;1 | 11,4067 | 24,081 | 31,685 | 40,557 |
| Vк 1;2 | 3,09885 | 6,542 | 8,6079 | 11,018 |
| Vк 2;2 | 4,33952 | 9,1612 | 12,054 | 15,429 |
| Vк 3;2 | 6,07973 | 12,835 | 16,888 | 21,617 |
Таблица 5 определение силы сопротивления движению
| n i500 | n i1100 | n i1500 | n i2100 | |
| Pw 4;2 | Pw 4;2 | 27,011 | 120,38 | 208,42 |
| Pw 5;2 | Pw 5;2 | 211,77 | 943,81 | 1634 |
Таблица 6 Определение динамического фактора
| n i500 | n i1100 | n i1500 | n i2100 | |
| D 1;1 | 0,1723 | 0,3001 | 0,3115 | 0,2863 |
| D 2;1 | 0,1147 | 0,1998 | 0,2074 | 0,1906 |
| D 3;1 | 0,0826 | 0,1439 | 0,1494 | 0,1373 |
| D 4;1 | 0,0585 | 0,1019 | 0,1058 | 0,0973 |
| D 1;2 | 0,0493 | 0,0859 | 0,0892 | 0,0820 |
| D 2;2 | 0,0328 | 0,0571 | 0,0593 | 0,0545 |
| D 3;2 | 0,0236 | 0,0395 | 0,0398 | 0,0335 |
| D 4;2 | 0,0167 | 0,0261 | 0,0245 | 0,0165 |

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰).
Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим.

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни.
Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций.
Окружная сила на ведущих колесах Fk при движении автомобиля затрачивается на преодоление сил сопротивления: воздуха Fв качению Ff, подъему Fi и разгону Fj автомобиля, т.е.
Записав в этом уравнении вместо сил выражения, их определяющие, получим:
Разрешив последнее выражение относительно ускорения автомобиля, для случая его разгона будем иметь:
Уравнение (*) называется уравнением движения автомобиля.
ma – полная масса автомобиля, кг,
Me – крутящий момент двигателя, Нм,
Uтр – передаточное число трансмиссии,
r0 – расчетный радиус качения ведущих колес, м,
тр – коэффициент полезного действия трансмиссии,
kв – коэффициент сопротивления воздуха
V – скорость движения автомобиля
Ав – площадь лобового сопротивления
f – коэффициент сопротивления качению
i – величина продольного уклона дороги
α- угол наклона продольного профиля дороги, град
d - коэффициент учета вращающихся масс автомобиля.
Данное уравнение справедливо при неустановившемся движении автомобиля, при этом:
Тяговая характеристика – это зависимость
Jm – момент инерции маховика двигателя и ведущей части сцепления; Jki – момент инерции i-го колеса автомобиля; n – число колес автомобиля
Уравнение движения автомобиля (*) решают численными методами на ЭВМ или приближенно, используя графоаналитические методы.
Графическое изображение уравнения силового (тягового) баланса в координатах “окружная сила - скорость”, называется тяговой характеристикой автомобиля.
Кривые изменения окружной силы на передачах строят по опытным данным либо по расчетным данным.
Количество кривых тяговой характеристики автомобиля равно числу передач в его коробке.
Из тяговой характеристики:
1) максимальная скорость движения автомобиля Vmax.
2) Максимально возможная сила сопротивления дороги Fymax, которую может преодолеть автомобиль при заданной скорости.
3) Максимальная окружная сила Fкmax по сцеплению шин ведущих колес с дорогой Fj.
4) критическая скорость Vкi движения автомобиля по условиям величины окружной силы на ведущих колесах и области устойчивого движения автомобиля при полной нагрузке двигателя.
5) скоростной диапазон автомобиля на i-ой передаче.
6) силовой диапазон автомобиля на i-ой передаче
Динамическая прочность трансмиссии; принцип определения максимальных динамических нагрузок.
Экспериментально установлено, что наибольший момент в ТР возникает при трогании автомобиля с быстрым включением сцепления (броском педали). Этот момент может значительно превышать максимальный момент ДВС. Максимальный момент в ТР для расчетов на прочность определяется по наибольшему его значению, которое имеет место при буксующем сцеплении и практически неподвижном автомобиле. Максимальная динамическая нагрузка в ТР зависит от характеристик ДВС и сцепления, от параметров динамической системы автомобиля.
Определение максимальных динамических нагрузок в ТР автомобилей 4х2 и 6х4 можно выполнять по пятимассовой динамической системе,
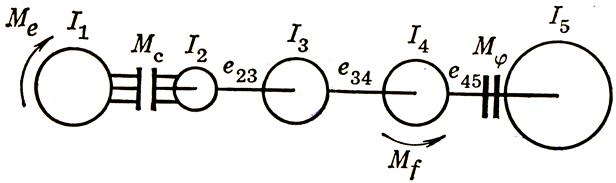
где - моменты инерции: I1 – двигателя с маховиком; I2 – ведомого диска сцепления; I3 – деталей ТР; I4 – ведущих колес; I5 – маховика, эквивалентного поступательно движущейся массе автомобиля;
- приведенные податливости системы соответствуют податливостям: е23 – деталям КП и карданной передачи; е34 – полуосям; е45 – тангенциальной податливости шин.
Ме - крутящий момент, определяемый внешней характеристикой ДВС;
Mf – приведенный момент сопротивления движению:
f –коэф. сопротивл. качению; ma –масса авто; ro –радиус качения колеса; UТ- передаточн. число трансмиссии.
Mj - момент сцепления:
где j - коэф. сцепления(по тв. сух. дор.); Gj - сцепной вес авто.
МС – момент трения сцепления: ,
где – статический момент полностью включенного сцепления; - коэф. запаса сцепления; – константа, характеризующая темп включения сцепления (tс – время включения сцепления, при броске сцепления составляет 0,01…0,03с).
Наиболее часто при анализе сложных с-м для вывода ур-ий движ. используют ур-ия Лагранжа 2-го рода.
Кинетич. и потенциальная энергии:
Произведя дифф-ие выр. Энергии и подставив соотв. произв-ые и обобщ. коор-ты получим с-му ур-ий, опис-их движ-е масс рассматриваемой с-мы:
где ji - обобщ. коор-ты (углы поворота масс).
Динамическую нагруженность транс-ии оценивают коэффициентом нагруженности Кд= Mтmax/Memax (Mтmax и Memax – максимальный момент соответственно в звене транс-ии и ДВС).
Расчетами и эксперим-ми установлено, что max динамич. нагрузка зависит в наибольшей степени от общего передаточного числа транс-ии.
При приближенных расчетах:
при 20 0, а на отбое
© 2014-2022 — Студопедия.Нет — Информационный студенческий ресурс. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав (0.008)
Полноприводные трансмиссии стали очень популярны в последнее время. Раньше это был удел внедорожников, спортивных или представительских автомобилей. Скачок произошел благодаря стремительно ворвавшимся на рынок и полюбившимся всем кроссоверам.
Привод на все 4 колеса здесь в подавляющем большинстве реализован с применением фрикционных муфт, подключающих по требованию либо одну из осей, либо индивидуально каждое из колес оси. Давайте разбираться, почему стоит переплатить за полный привод, даже если он реализован через муфту.
Условимся, что самое большое бездорожье, которое увидит наш полноприводный автомобиль – сугроб во дворе или наледь на въезде на парковку , в противном случае речь должна идти о более серьезной технике, и помимо способа реализации системы полного привода важную роль будут играть шины, геометрия подвески, кузова и т.д.
Что заставляет автомобиль ехать вообще и преодолевать указанные препятствия в частности? Сила трения покоя – то, из-за чего автомобиль движется относительно опорной поверхности. При этом автомобиль испытывает аэродинамическое сопротивление (сильно влияющее при больших скоростях), сопротивление качению (обусловленное типом дорожного покрытия), а также требуется преодолевать силы инерции при изменении скорости. И в пятне контакта колеса и дороги мы реализуем силу тяги, которая и заставляет наш автомобиль двигаться вопреки указанным сопротивлениям.
Максимальная тяговая сила на ведущем колесе автомобиля зависит от массы приходящейся на это колесо и коэффициента сцепления , а если двигатель может передать на колесо больше, чем оно может реализовать по сцеплению – пробуксовка.
где F - сила тяги колеса, m - масса, приходящаяся на колесо, g - ускорение свободного падения, φ - коэффициент сцепления.
Таблица из учебника. Наглядная демонстрация зависимости коэффициента сцепления от типа дорожного покрытия: на сухом асфальте "зацеп" в 5 раз больше, чем на льду!
Таблица из учебника. Наглядная демонстрация зависимости коэффициента сцепления от типа дорожного покрытия: на сухом асфальте "зацеп" в 5 раз больше, чем на льду!
Что мы видим из анализа этой формулы?
Сила тяги не прямо, но пропорциональна количеству приводных колес, и зависит от развесовки автомобиля по осям и колесам. В случае с моноприводным автомобилем мы можем реализовать лишь сцепной вес, приходящийся на ведущую ось, у полноприводного – 100%.
Для примера, на льду переднеприводный автомобиль массой 1200кг и развесовкой 55:45 сможет развить тяговое усилие
F=1200*0,55*9,81*0,15= 971 Н, в то время как полноприводный - 1766 Н.
Разумеется, ограничить возможности может физика работы дифференциалов , которые уравнивают крутящий момент между осями/колесами по наименьшему, но в случае с кроссоверами между осями этого дифференциала мы и не имеем. Если электроника (речь про современные кроссоверы) решила, что задним колесам (в большинстве случаев подключаемая именно эта ось) нужна порция крутящего момента, то автомобиль на время превращается в Part-time внедорожник! Плюс к тому, электроника достаточно ловко умеет притормаживать буксующие колеса, реализуя тормозной момент этого колеса на уверенно стоящем колесе другого борта.
На скользких или рыхлых поверхностях это играет ключевую роль! Вы без проблем сможете проехать дальше и увереннее, т.к. каждое колесо пытается реализовать тяговое усилие, направленное вперед, а в случае с "моноприводом" усилия двух может не хватить. Такой полный привод еще и влияет на безопасность многих маневров , таких как поворот налево при встречном потоке, выезд с прилегающей территории или со второстепенной дороги, когда необходимо динамично влиться в поток.
Некоторые автопроизводители называют кроссоверами автомобили, конструктивно не имеющие полного привода. Чтобы это компенсировать, они на уровне электроники добавляют системы помощи водителю, которые должны из обычного автомобиля сделать вседорожник. Обычно это происходит за счет изменения отзывчивости педали газа, алгоритма работы системы стабилизации и т.д. Но против физики не пойдешь: весь потенциал сцепного веса реализовать не получится, одна из осей будет обузой.
Наглядным примером несостоятельности такого решения будет видео ниже. Коротко: Renault Captur с системой помощи водителю и передним приводом против Suzuki Vitara S с полным приводом через муфту на задней оси. Первому автомобилю система помогла, автомобиль заехал, но в разы увереннее это получилось у полного привода.
Читайте подробнее про системы полного привода по ссылочке .
Читайте также: